physical5xoy.com
5xoy.com 时间:2021-03-19 阅读:()
TwodegreesoffreedomrotatingwallblockingsunlightdirectlytrackingcontrolmodelWangShuying1,a*,WangYi2,b1NanjingInstituteofIndustryTechnology,China2SchoolofcomputerscienceandtechnologyNanjingUniversityofScienceandTechnology,Chinaawangsy@niit.
edu.
cn,b893762530@qq.
comKeywords:twodegreeoffreedom,Wallblock,Sunlightdirectly,Automatictracking,SignalcombinationAbstract.
Thispaperexpoundsthenecessityofsuntracking,thepaperanalyzesthestraightlinedirectionandplanearoundtheessenceoffixed-pointmovement,designsthelighthittingthetrackverticalmodel,detailsmodelofthestructurefeatureandfunctionalperformance,givescontrolequationsandthecorrespondingrelationtableseries,combinedwiththesunmotionlaw,theuseofspecificmethodsisgiven.
IntroductionSolarenergyisapermanenttopicofhumanstudies,oneofthecoreproblemistoimprovethesolarenergyconversionrate.
Intheilluminationareamustbeundertheconditionoflightconversiontechnologycan'timprove,improvethesun'srayspoint-blanktimethanisthekey,Accordingtothetest,undertheconditionofsamesunlightverticalirradiationishigherthannaturalexposureequipmentcapacitymorethan35%[1],Duetothesunisclearanceanglemotion,requestlightequipmentisalwayskeepverticalstateismoredifficultwiththesun.
Usingthetrackingsystemofthemarketatpresentismainlythepresetprogramcontrolandunidirectionaluniformcontrolmachinery,theformerneedsmorecomplexcontrollerhighcostofartificialcontrolfactors,thecontrolaccuracyisnothigh,toavoidbadweatherfunctionispoor,withacontinuousrunofhighfailurerate.
Usingplaneandthenormalrelationship,thispaperdesignstheautomaticlightpoint-blanktrackingsystem,itiscomposedofstents,two-dimensionalindependentrotatingmechanism,lightplane,paralleltothewallblocktypesignalreceiver,andothercomponentsofthedrivecontroller,Withthemethodofcombiningtheorywithphysicalmodel,theplanearoundthefixedpointmotion,lightsurfacetwodegreeoffreedomrotationalandcuboidsopencontainerwallsidelightincidentangletounify,establishalistofcontrolequationsandthecorrespondingrelationofeachlink,sunlightforspecificpositiontracking,detailedsettingsandcontrolmethodsarepresented.
Thisdevicehassimplestructure,lowcost,convenientinstallation,highapplicability,equippedwiththeclockfunction,canautomaticallyreturnoravoidbadweather,prolonglife,reduceenergyconsumption.
Theplaneoffixed-pointrotation.
InspacerectangularcoordinatesystemOxyz(figure1),straightlineLthroughtheoriginO,directionangleforgba,,(LandthreeaxisangleOzOyOx,,)[2],PisLonabit,thedirectionofthevectorOPcosineofgbacos,cos,cos,andthereare1coscoscos222=++gba.
PlanePovertheoriginOandOPasnormalvector,theequationsof0coscoscos=++gbazyx.
(1)Figure1.
ThevectorandcoordinateplaneAngle.
Figure2.
Independentrotatingmechanism.
LinearL,OyhavetoplaneyOPwithananglecoordinateplaneyOzis1f,LinearL,OxhavetoplanexOPwithananglecoordinateplaneyOzis2f,andtherearegbfgafcoscostancoscostan21==,(2)Bytype(1)cangetthenormalvectorofplanePdirectioncosineofOPareasfollows:221212121ff+fff±=atantansecsectancos,221212122ff+fff±=btantansecsectancos,221211f+f+±=gtantancos.
(3)Type(3)showthatlinearLofdirectionangleisrelatedtotheplaneangle.
AcoordinateaxisOyto{}11sin,0,cosffforthegeneralequationofthenormalvectorofplane1P0sincos11=+ffzx,flat1PlineandperpendiculartotheaxisoftheOyonoriginfor1L.
Setthe()t,t,tn111gba=isrelatedtotheparameterttrend,WithninthenormalvectorattheoriginofdynamicequationsforplanarS:0111=++tcosztcosytcosxgba.
(4)IftheplaneofSfromequationfor0=z0P(andcoordinateplanexOyoverlap),Oyastheaxisofrotationafter1fand1Poverlap,planeangle1fcalledplanar1Pinweftdirectionangle,Oyaszonalrotor;WhentheSplane1Pfromthebeginning,1Lastheaxisofrotationafter2fandPoverlap,planeangle2fcalledplanarPinwarpdirectionangle,1Lcalledmeridianaxis.
TurnflatSfrom0Pto1PtoJackson'smovementcalledplanarSorthogonalindependentdirectionalmovementaroundtheorigin.
IfastraightlineofLrepresentsalightintothelightoftheorigin,threecoordinatesurfaceareitsincidentplanesurface(light)[3],LightLdirectionangleofgba,,,respectivelyistheangleofincidencelightonthesurfaceofxOy,zOx,yOz,LattheoriginoftheverticalplaneisP.
Ifthelightisinmotion,thedirectionofthelightLangleisafunctionoftheparametert()t,t,t,,gbagba=,equation(3)isstillthetype,CalledtheplanePtargetplane,planeSreferredtoasthetracksurface.
Whentheluminousbodymovement,thelightofL()t,t,tgbadirectionangle,thetargetplanePturnaroundtheorigin,trackingplaneSjustkeepconsistentwiththemotionofplaneofP.
PlaneSfrom0PtoPistheprocessofthefasttrack,inaccordancewithPprocessforsynchronoustracking.
RotatingmechanismComponentcombinationoffigure2arecalledorthogonalrotationmechanism,amongthem,therectangularplaneABCDinstalledinsidearectangularplaneframe1111DCBA,1111,,,HGFE,inturn,isthemidpointoftheborderaroundthe1111DCBA11111111,,,ADDCCBBA,respectivelyfixedin11,HGaverticalaxisof11DA2111,WHWG,twoaxis2111,WHWGinthesameline,twoaxisrespectivelyfixedtothebrackettotheouterendofthe21LL,atthetopofthebearing,inmotor1M,mountedonthebracket2Lmotorareconnectedtotheshaft21WH1M,motor1Mrectangularframe1111DCBA21WWrotatearoundtheaxisrotationcanbecarriedon.
FE,,respectivelyisthemidpointoftwoparallelplaneABCDedgeCDAB,,respectivelyfixedatFE,averticalaxisofABFFEE11,,boththeouterendoftheshaftFFEE11,respectivelyfixedontheframe1111DCBA11,FEplacebearing,twoaxisinthesameline,intheframeworkoftheAB1E2Mequippedwithmotor,themotorareconnectedtotheshaftEE12M,motor2McandriveaxisrotationEE1rotation.
Stents21LL,fixedtothecenteroftherectangularplanarframe1111DCBAfororiginOestablishthecoordinatesystemOxyzinfigure1,axialmisalignments+Oyand21WW,+Ox,+Oy,+Ozverticalshaft,planeABCDisthedynamicequationfor(4)planeS.
ABCDand1111DCBAwhen0=tandcoordinateplanexOyoverlap,axisof11FEonaxisOx,planeABCDis0P.
Startthemotor1M(0>t),lettheABCDwith1111DCBAclosedaftertherotationangleof1f(1tt=),fixed1111DCBA,rectangle1111DCBA'splaneis1P.
1Laxis11FEisthestraightline.
2M,startthemotortotheABCDaroundtheaxisof11FE2fclosedafter(2tt=),ABCDistheplaneequation(1)theplaneoftheP.
Obviously,trackingplaneABCDforfasttrack,setstheangularvelocityofthemotor1Mto11v,axisof21WWangularvelocity11111vwk=,motor2Mangularvelocityasthe21v,axisof11FEangularvelocityasthe21221vwk=,thereare()()1221212222--ttkttvwf=0111101121--ttkttvwf==(5)Duetotheaxisof21WW,11FEwereindependentofthevertical,thelocationoftheplaneABCDin0Pcanstartthemotor1Mand2M,atthesametimerotationrespectively()0111-ttv,()1221-ttvcanalsoarrivedatthelocationoftheP,shortesttrackingto{}1201--tt,ttmax.
Theessenceofthismovementistherotationofthetwoplaneintersectingline,thecoordinateplaneyOzzOxOx,Oyaxisseparaterotating1f,2f,aftertheintersectionofaturnbeforeOzastherotationofLlineinastraightline.
ThesignalreceiverReceiveriscomposedofsixplane2222DCBA,3333DCBA,3322ADDA,3322BCCB,3322ABBA,3322CDDCemptycontainers,roundintorectangularshape2222DCBA-3333DCBA.
theunderside2222DCBAissidelengthisa2square,foursides3322ADDA,3322BCCB,3322ABBA,3322CDDCiswidefora2lengthof()ahh2>rectangle,thefivesurfaceismadeofopaquematerialsheet,thedetailedspecificationsheetiscoatedwithalayerofinsulatingmaterial,theinsideofeachpieceofthinplatewithuniformphotosensitivematerials(orphotosensitivecomponents),photosensitivematerialcanbelightsignalinduction(current)[4],theintersectinglinesbetweenadjacenttwopiecesofthinplatewithinsulationmaterials,cantheindependentsignallightsheetcalledlightsensor,withiG()521,,iL=,inturn,saidtheplane2222DCBA,3322ABBA,3322BCCB,3322CDDC,3322ADDAontheopticalsensor,lightsensoroneachsidetohaveseparatewirestotheoutputsignal,ontheunderside3333DCBAismadeoftransparentmaterialsfora2squaresheet.
Putthereceiverdownunderside2222DCBAfixedonthelightsidetheABCD,2222DCBAcenterandthecenteroftheABCDcoincidence,twoparallelside3322ABBA,3322CDDCperpendiculartotheaxis11FE,theothertwoparallelside3322ADDA,3322BCCBparallelaxis11FE.
WhenthelightplanetheABCDandcoordinateplanexOyoverlap,thesideofthereceiverandthecoordinatesurfacezOx,yOzparallel,lightLwitheachcoordinateplaneangleisequaltoitandthereceiverrespectivelyinsideplaneangle.
InreceiverwithABCDrotates,thelightandthechangeofthewallangleistworotationanglechange.
SetintothelightandfivelightsensoronthesurfaceoftheiGintheangleofincidenceof20pq>>>>>===ff,forcounterclockwiserotation.
Fantasy(8)andtable4usedindirectsunlighttrackingcontrol,itisconvenienttobeusedinparameteridentificationandtracking.
Ontheearth'ssurfacewherethesuntrackingsystem,fixedlightof21WWtoeastdirectionandhorizontalzonalaxis,receiverup.
InthecoordinatesystemOxyztrackingsystem,thesunasaparticle,thesunislinearL,thesunrisesfallandseasonalvariationoftheearth,istheearth'srotationandorbitaroundthesun,showthestraightlineofLinspherebythemotionofparticlesonandweftmotionsynthesis[5],thedynamiclinearLaroundtheoriginangletothewarpandweftanglechange.
ThesunweretoriseinthefallvelocityequaltotheearthrotationangularvelocitybpwT210=,seasonofthesunmovementspeedisequaltotheearth'sorbitalangularvelocityagwT0204=(aT,bTearth'sorbitalperiodandrotationrespectively,0gforearth'sequatorandtheeclipticplaneangle[5]).
Systemofsynchronoustrackingspeed:conventionalmotorvelocityvector:201020100ww,Kv,vV=.
(bpwT210=21WWfortherotationangularvelocity,agwT0204=11FEfortherotationangularvelocity).
Systemoffasttrackingspeed:Isthe()()2212221111v,vVv,vV,,thefasttrackingspeedofthemotor,canconsidersystemfactorssuchasfriction,load,motorpower,recyclingtype(4)(5)toset.
Systeminitializationsetting:duetothediscontinuousappearandthechangeintheweather,towardthegroundofsunlightisintermittent,tosaveenergyconsumptiontoincreasesystemlifetime,onlysetupinlocalwork,whenthesundidnotstopworklight,lightangleoftwoadjacenttothelargest1800(earlyandlate),nointervaloftimewhentheweatherisadarknight,whentheweatherintervaloftime,tofacilitatethenextjoborthesystemfailurecanstillmaintaingoodradiationeffect,canincreasetheclocksinthecontrolsystem,inarowwithoutlightirradiationtimethroughthesystemtoreturntothepreviousworkingdayafternoon.
ConclusionBasedonthecharacteristicsoftheplaneandthenormal,thispaperanalyzesthelightaroundthepointmovementprinciple,designsthelightplanerotationmechanism,thetwodegreeoffreedomparallelwallblockingthesignalreceiveranddrivingcontroller,setsupthelightincidentanglecombination,signalconversion,drivemode,orthogonalaxisangleandlightingseriesofplanerotationcontrolequation,andbythelistthatgivecorrespondingrelations,combinedwiththefeatureofthesuntogivefurthertrackingcontrolmethod,itisrecommendedtousetheclockfunctionsetsthesysteminitializationconditions.
References[1]M.
WeiXinJiao,HongZou:Planetaryscience(PekingUniversitypress,China2009)[2]M.
WenMaoYang,QuanYingLi:Spaceanalyticgeometry(Wuhanuniversitypress,China2002).
[3]J.
ShuyingWang:switzerland,AdvancedMaterialResearch.
Vol.
748(2013),PP:811-814.
[4]M.
ShenshengLi:Anintroductiontosolarenergyheatutilization(Highereducationpress,China1989).
[5]M.
SuYi:Introductiontoastronomynew(sciencepress,China2009).
edu.
cn,b893762530@qq.
comKeywords:twodegreeoffreedom,Wallblock,Sunlightdirectly,Automatictracking,SignalcombinationAbstract.
Thispaperexpoundsthenecessityofsuntracking,thepaperanalyzesthestraightlinedirectionandplanearoundtheessenceoffixed-pointmovement,designsthelighthittingthetrackverticalmodel,detailsmodelofthestructurefeatureandfunctionalperformance,givescontrolequationsandthecorrespondingrelationtableseries,combinedwiththesunmotionlaw,theuseofspecificmethodsisgiven.
IntroductionSolarenergyisapermanenttopicofhumanstudies,oneofthecoreproblemistoimprovethesolarenergyconversionrate.
Intheilluminationareamustbeundertheconditionoflightconversiontechnologycan'timprove,improvethesun'srayspoint-blanktimethanisthekey,Accordingtothetest,undertheconditionofsamesunlightverticalirradiationishigherthannaturalexposureequipmentcapacitymorethan35%[1],Duetothesunisclearanceanglemotion,requestlightequipmentisalwayskeepverticalstateismoredifficultwiththesun.
Usingthetrackingsystemofthemarketatpresentismainlythepresetprogramcontrolandunidirectionaluniformcontrolmachinery,theformerneedsmorecomplexcontrollerhighcostofartificialcontrolfactors,thecontrolaccuracyisnothigh,toavoidbadweatherfunctionispoor,withacontinuousrunofhighfailurerate.
Usingplaneandthenormalrelationship,thispaperdesignstheautomaticlightpoint-blanktrackingsystem,itiscomposedofstents,two-dimensionalindependentrotatingmechanism,lightplane,paralleltothewallblocktypesignalreceiver,andothercomponentsofthedrivecontroller,Withthemethodofcombiningtheorywithphysicalmodel,theplanearoundthefixedpointmotion,lightsurfacetwodegreeoffreedomrotationalandcuboidsopencontainerwallsidelightincidentangletounify,establishalistofcontrolequationsandthecorrespondingrelationofeachlink,sunlightforspecificpositiontracking,detailedsettingsandcontrolmethodsarepresented.
Thisdevicehassimplestructure,lowcost,convenientinstallation,highapplicability,equippedwiththeclockfunction,canautomaticallyreturnoravoidbadweather,prolonglife,reduceenergyconsumption.
Theplaneoffixed-pointrotation.
InspacerectangularcoordinatesystemOxyz(figure1),straightlineLthroughtheoriginO,directionangleforgba,,(LandthreeaxisangleOzOyOx,,)[2],PisLonabit,thedirectionofthevectorOPcosineofgbacos,cos,cos,andthereare1coscoscos222=++gba.
PlanePovertheoriginOandOPasnormalvector,theequationsof0coscoscos=++gbazyx.
(1)Figure1.
ThevectorandcoordinateplaneAngle.
Figure2.
Independentrotatingmechanism.
LinearL,OyhavetoplaneyOPwithananglecoordinateplaneyOzis1f,LinearL,OxhavetoplanexOPwithananglecoordinateplaneyOzis2f,andtherearegbfgafcoscostancoscostan21==,(2)Bytype(1)cangetthenormalvectorofplanePdirectioncosineofOPareasfollows:221212121ff+fff±=atantansecsectancos,221212122ff+fff±=btantansecsectancos,221211f+f+±=gtantancos.
(3)Type(3)showthatlinearLofdirectionangleisrelatedtotheplaneangle.
AcoordinateaxisOyto{}11sin,0,cosffforthegeneralequationofthenormalvectorofplane1P0sincos11=+ffzx,flat1PlineandperpendiculartotheaxisoftheOyonoriginfor1L.
Setthe()t,t,tn111gba=isrelatedtotheparameterttrend,WithninthenormalvectorattheoriginofdynamicequationsforplanarS:0111=++tcosztcosytcosxgba.
(4)IftheplaneofSfromequationfor0=z0P(andcoordinateplanexOyoverlap),Oyastheaxisofrotationafter1fand1Poverlap,planeangle1fcalledplanar1Pinweftdirectionangle,Oyaszonalrotor;WhentheSplane1Pfromthebeginning,1Lastheaxisofrotationafter2fandPoverlap,planeangle2fcalledplanarPinwarpdirectionangle,1Lcalledmeridianaxis.
TurnflatSfrom0Pto1PtoJackson'smovementcalledplanarSorthogonalindependentdirectionalmovementaroundtheorigin.
IfastraightlineofLrepresentsalightintothelightoftheorigin,threecoordinatesurfaceareitsincidentplanesurface(light)[3],LightLdirectionangleofgba,,,respectivelyistheangleofincidencelightonthesurfaceofxOy,zOx,yOz,LattheoriginoftheverticalplaneisP.
Ifthelightisinmotion,thedirectionofthelightLangleisafunctionoftheparametert()t,t,t,,gbagba=,equation(3)isstillthetype,CalledtheplanePtargetplane,planeSreferredtoasthetracksurface.
Whentheluminousbodymovement,thelightofL()t,t,tgbadirectionangle,thetargetplanePturnaroundtheorigin,trackingplaneSjustkeepconsistentwiththemotionofplaneofP.
PlaneSfrom0PtoPistheprocessofthefasttrack,inaccordancewithPprocessforsynchronoustracking.
RotatingmechanismComponentcombinationoffigure2arecalledorthogonalrotationmechanism,amongthem,therectangularplaneABCDinstalledinsidearectangularplaneframe1111DCBA,1111,,,HGFE,inturn,isthemidpointoftheborderaroundthe1111DCBA11111111,,,ADDCCBBA,respectivelyfixedin11,HGaverticalaxisof11DA2111,WHWG,twoaxis2111,WHWGinthesameline,twoaxisrespectivelyfixedtothebrackettotheouterendofthe21LL,atthetopofthebearing,inmotor1M,mountedonthebracket2Lmotorareconnectedtotheshaft21WH1M,motor1Mrectangularframe1111DCBA21WWrotatearoundtheaxisrotationcanbecarriedon.
FE,,respectivelyisthemidpointoftwoparallelplaneABCDedgeCDAB,,respectivelyfixedatFE,averticalaxisofABFFEE11,,boththeouterendoftheshaftFFEE11,respectivelyfixedontheframe1111DCBA11,FEplacebearing,twoaxisinthesameline,intheframeworkoftheAB1E2Mequippedwithmotor,themotorareconnectedtotheshaftEE12M,motor2McandriveaxisrotationEE1rotation.
Stents21LL,fixedtothecenteroftherectangularplanarframe1111DCBAfororiginOestablishthecoordinatesystemOxyzinfigure1,axialmisalignments+Oyand21WW,+Ox,+Oy,+Ozverticalshaft,planeABCDisthedynamicequationfor(4)planeS.
ABCDand1111DCBAwhen0=tandcoordinateplanexOyoverlap,axisof11FEonaxisOx,planeABCDis0P.
Startthemotor1M(0>t),lettheABCDwith1111DCBAclosedaftertherotationangleof1f(1tt=),fixed1111DCBA,rectangle1111DCBA'splaneis1P.
1Laxis11FEisthestraightline.
2M,startthemotortotheABCDaroundtheaxisof11FE2fclosedafter(2tt=),ABCDistheplaneequation(1)theplaneoftheP.
Obviously,trackingplaneABCDforfasttrack,setstheangularvelocityofthemotor1Mto11v,axisof21WWangularvelocity11111vwk=,motor2Mangularvelocityasthe21v,axisof11FEangularvelocityasthe21221vwk=,thereare()()1221212222--ttkttvwf=0111101121--ttkttvwf==(5)Duetotheaxisof21WW,11FEwereindependentofthevertical,thelocationoftheplaneABCDin0Pcanstartthemotor1Mand2M,atthesametimerotationrespectively()0111-ttv,()1221-ttvcanalsoarrivedatthelocationoftheP,shortesttrackingto{}1201--tt,ttmax.
Theessenceofthismovementistherotationofthetwoplaneintersectingline,thecoordinateplaneyOzzOxOx,Oyaxisseparaterotating1f,2f,aftertheintersectionofaturnbeforeOzastherotationofLlineinastraightline.
ThesignalreceiverReceiveriscomposedofsixplane2222DCBA,3333DCBA,3322ADDA,3322BCCB,3322ABBA,3322CDDCemptycontainers,roundintorectangularshape2222DCBA-3333DCBA.
theunderside2222DCBAissidelengthisa2square,foursides3322ADDA,3322BCCB,3322ABBA,3322CDDCiswidefora2lengthof()ahh2>rectangle,thefivesurfaceismadeofopaquematerialsheet,thedetailedspecificationsheetiscoatedwithalayerofinsulatingmaterial,theinsideofeachpieceofthinplatewithuniformphotosensitivematerials(orphotosensitivecomponents),photosensitivematerialcanbelightsignalinduction(current)[4],theintersectinglinesbetweenadjacenttwopiecesofthinplatewithinsulationmaterials,cantheindependentsignallightsheetcalledlightsensor,withiG()521,,iL=,inturn,saidtheplane2222DCBA,3322ABBA,3322BCCB,3322CDDC,3322ADDAontheopticalsensor,lightsensoroneachsidetohaveseparatewirestotheoutputsignal,ontheunderside3333DCBAismadeoftransparentmaterialsfora2squaresheet.
Putthereceiverdownunderside2222DCBAfixedonthelightsidetheABCD,2222DCBAcenterandthecenteroftheABCDcoincidence,twoparallelside3322ABBA,3322CDDCperpendiculartotheaxis11FE,theothertwoparallelside3322ADDA,3322BCCBparallelaxis11FE.
WhenthelightplanetheABCDandcoordinateplanexOyoverlap,thesideofthereceiverandthecoordinatesurfacezOx,yOzparallel,lightLwitheachcoordinateplaneangleisequaltoitandthereceiverrespectivelyinsideplaneangle.
InreceiverwithABCDrotates,thelightandthechangeofthewallangleistworotationanglechange.
SetintothelightandfivelightsensoronthesurfaceoftheiGintheangleofincidenceof20pq>>>>>===ff,forcounterclockwiserotation.
Fantasy(8)andtable4usedindirectsunlighttrackingcontrol,itisconvenienttobeusedinparameteridentificationandtracking.
Ontheearth'ssurfacewherethesuntrackingsystem,fixedlightof21WWtoeastdirectionandhorizontalzonalaxis,receiverup.
InthecoordinatesystemOxyztrackingsystem,thesunasaparticle,thesunislinearL,thesunrisesfallandseasonalvariationoftheearth,istheearth'srotationandorbitaroundthesun,showthestraightlineofLinspherebythemotionofparticlesonandweftmotionsynthesis[5],thedynamiclinearLaroundtheoriginangletothewarpandweftanglechange.
ThesunweretoriseinthefallvelocityequaltotheearthrotationangularvelocitybpwT210=,seasonofthesunmovementspeedisequaltotheearth'sorbitalangularvelocityagwT0204=(aT,bTearth'sorbitalperiodandrotationrespectively,0gforearth'sequatorandtheeclipticplaneangle[5]).
Systemofsynchronoustrackingspeed:conventionalmotorvelocityvector:201020100ww,Kv,vV=.
(bpwT210=21WWfortherotationangularvelocity,agwT0204=11FEfortherotationangularvelocity).
Systemoffasttrackingspeed:Isthe()()2212221111v,vVv,vV,,thefasttrackingspeedofthemotor,canconsidersystemfactorssuchasfriction,load,motorpower,recyclingtype(4)(5)toset.
Systeminitializationsetting:duetothediscontinuousappearandthechangeintheweather,towardthegroundofsunlightisintermittent,tosaveenergyconsumptiontoincreasesystemlifetime,onlysetupinlocalwork,whenthesundidnotstopworklight,lightangleoftwoadjacenttothelargest1800(earlyandlate),nointervaloftimewhentheweatherisadarknight,whentheweatherintervaloftime,tofacilitatethenextjoborthesystemfailurecanstillmaintaingoodradiationeffect,canincreasetheclocksinthecontrolsystem,inarowwithoutlightirradiationtimethroughthesystemtoreturntothepreviousworkingdayafternoon.
ConclusionBasedonthecharacteristicsoftheplaneandthenormal,thispaperanalyzesthelightaroundthepointmovementprinciple,designsthelightplanerotationmechanism,thetwodegreeoffreedomparallelwallblockingthesignalreceiveranddrivingcontroller,setsupthelightincidentanglecombination,signalconversion,drivemode,orthogonalaxisangleandlightingseriesofplanerotationcontrolequation,andbythelistthatgivecorrespondingrelations,combinedwiththefeatureofthesuntogivefurthertrackingcontrolmethod,itisrecommendedtousetheclockfunctionsetsthesysteminitializationconditions.
References[1]M.
WeiXinJiao,HongZou:Planetaryscience(PekingUniversitypress,China2009)[2]M.
WenMaoYang,QuanYingLi:Spaceanalyticgeometry(Wuhanuniversitypress,China2002).
[3]J.
ShuyingWang:switzerland,AdvancedMaterialResearch.
Vol.
748(2013),PP:811-814.
[4]M.
ShenshengLi:Anintroductiontosolarenergyheatutilization(Highereducationpress,China1989).
[5]M.
SuYi:Introductiontoastronomynew(sciencepress,China2009).
- physical5xoy.com相关文档
- application5xoy.com
- special5xoy.com
- CLOCK5xoy.com
- LBM5xoy.com
- 射线5xoy.com
- Twtrt5xoy.com
CloudCone闪购优惠洛杉矶MC机房VPS月$1.99 便宜可随意删除重开
CloudCone商家我们很多喜欢低价便宜VPS主机的肯定是熟悉的,个人不是特别喜欢他。因为我之前测试过几次,开通的机器IP都是不通的,需要删除且开通好几次才能得到一个可用的IP地址。当然他们家的优势也是有的,就是价格确实便宜,而且还支持删除重新开通,而且机房只有一个洛杉矶MC。实话,如果他们家能多几个机房,保持现在的特点,还是有很多市场的。CloudCone是来自美国的主机销售商,成立于2017...
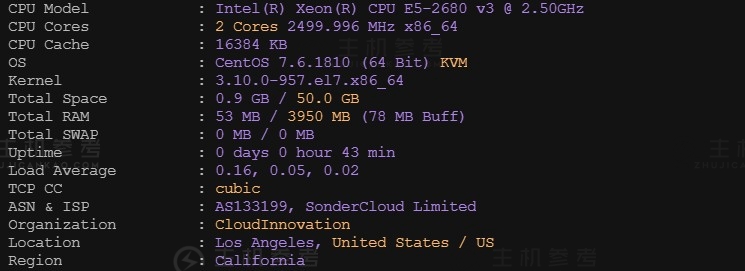
恒创科技SonderCloud,美国VPS综合性能测评报告,美国洛杉矶机房,CN2+BGP优质线路,2核4G内存10Mbps带宽,适用于稳定建站业务需求
最近主机参考拿到了一台恒创科技的美国VPS云服务器测试机器,那具体恒创科技美国云服务器性能到底怎么样呢?主机参考进行了一番VPS测评,大家可以参考一下,总体来说还是非常不错的,是值得购买的。非常适用于稳定建站业务需求。恒创科技服务器怎么样?恒创科技服务器好不好?henghost怎么样?henghost值不值得购买?SonderCloud服务器好不好?恒创科技henghost值不值得购买?恒创科技是...
香港E3-1230v2 16GB 30M 326元/月 数脉科技
官方网站:https://www.shuhost.com/公司名:LucidaCloud Limited尊敬的新老客户:艰难的2021年即将结束,年终辞旧迎新之际,我们准备了持续优惠、及首月优惠,为中小企业及个人客户降低IT业务成本。我们将持续努力提供给客户更好的品质与服务,在新的一年期待与您有美好的合作。# 下列价钱首月八折优惠码: 20211280OFF (每客户限用1次) * 自助购买可复制...

5xoy.com为你推荐
-
mathplayer如何学好理科嘀动网手机一键通用来干嘛呢?杰景新特谁给我一个李尔王中的葛罗斯特这个人物的分析?急 ....先谢谢了冯媛甑尸城女主角叫什么名字抓站工具一起来捉妖神行抓妖辅助工具都有哪些?sodu.tw今天sodu.org为什么打不开了?sodu.tw给个看免费小说的网站45gtv.comLETSCOM是什么牌子?鹤城勿扰黑龙江省的那个 城市是被叫做鹤城?百度关键字百度推广多少关键词合适