PROBLEMeee258.com
eee258.com 时间:2021-04-09 阅读:()
ARRAYCALIBRATIONWITHMODIFIEDITERATIVEHOS-SOS(MIHOSS)ALGORITHMMetinAktas,andT.
EnginTuncerElectricalandElectronicsEngineeringDepartment,MiddleEastTechnicalUniversity,Ankara,TURKEYmaktas@eee.
metu.
edu.
tr,etuncer@metu.
edu.
trhttp://www.
eee.
metu.
edu.
tr/sam/index.
htmlABSTRACTJointdirection-of-arrival(DOA)andsensorpositionestima-tionforrandomlydeployedsensorsisintroducedinItera-tiveHOS-SOS(IHOSS)algorithm[1].
IHOSSalgorithmex-ploitstheadvantagesofbothhigher-order-statistics(HOS)andsecond-order-statistics(SOS)withaniterativealgorithmusingtworeferencesensors.
Theiterativealgorithmisguar-anteedtoconverge.
IHOSSalgorithmsolvesthepositionam-biguitybyusingsourcesignalsobservedatmultiplefrequen-ciesandhenceitisapplicableforwidebandsignals.
Inthispaper,weproposeModied-IHOSS(MIHOSS)algorithmtosolvethesameproblemfornarrowbandsignals.
InMIHOSS,itisassumedthatthenominalsensorpositionsareknown.
Itisshownthatambiguityproblemissolvedeffectivelywith-outanyassumptiononthepositionperturbations.
Theup-perboundofperturbationsforunambiguoussensorpositionestimationispresented.
TheperformanceofMIHOSSap-proachestotheCramer-Raobound(CRB)forbothDOAandpositionestimation.
1.
INTRODUCTIONThedeviationofarrayparametersfromtheassumedmodelgenerateserrorsforthearrayprocessingapplicationsinclud-ingDOAestimationandbeamforming.
Gain/phasemis-matchofantennas,mutualcouplingandantennapositioner-rorsaresomeexamplesofarraymodelingerrors.
Arraycal-ibrationisthetaskofestimatingtheerrorsinarraymodelaswellastheDOAandsourceparameters.
Inthispaper,wefo-cusonarraycalibrationforthesensorpositionerrors.
Sensorpositionerrorsareimportantinpracticalapplicationswherethesensorsaredistributedinawideareaortherearesensordisplacementsduetotheplatformasinthecaseofsensorsonthewingtipsofaplane.
Inthispaper,jointDOAandsensorpositionestimationisdoneinasettingwherethenominalsensorpositionsareknown.
Inthiscase,itisassumedthattherearetworefer-encesensorswhosepositionsareknownperfectly.
Therestofthesensorsaredistributedrandomlyinalargearea.
Whilethenominalpositionsofthedistributedsensorsareknown,thereisnoassumptionontheperturbationforthesensorpo-sitions.
Notethattheproblemdenedaboveisdifferentthanthepartiallycalibratedarrays(PCA)[3]sincethenumberofsourcesisnotrestrictedtobelessthanthenumberofrefer-encesensors.
Furthermore,thesensorpositionsareestimatedinourcaseasopposedto[3].
Intheliterature,arraycalibrationproblemforthesensorpositionerrorsisinvestigatedintwosettings,namelysmallerror[4]andlargeerrorapproximations[5].
Insmallerrorapproximation,theperturbationsareassumedtobesmallandarraycalibrationisperformedbyusingarstorderapprox-imation.
Therstorderapproximationisnotapplicableastheperturbationsareincreased.
Largeerrorapproximation[5]isproposedtocircumventthelimitationsofthesmaller-rorapproximation.
HowevertheDOAestimationproblemisconsideredforauniformcirculararrayandforsomexedsourceDOAs.
Oneofthemainproblemsinsensorpositionestimationfromtheknowledgeofsourceobserveddataistheambiguityinsensorpositions.
Ambiguityarisesduetothewraparoundinarraysteeringmatrixphaseterms.
PreviouslyIHOSSalgorithm[1],[6]ispresented,whichjointlyusesHOSandSOSapproachesiterativelyforthees-timationofbothsourceDOAsandsensorpositions.
Theit-erativeprocessisguaranteedtoconverge.
InIHOSSalgo-rithm,exceptthetworeferencesensorsthereisnoaprioriinformationaboutthesensorpositions.
Thepositionsofthetworeferencesensorsareassumedtobeknown.
IHOSSal-gorithmconsiderstheambiguityprobleminsensorpositionestimationandsolvestheproblembyusingthesourcesig-nalsobservedatmultiplefrequencies.
Henceitisapplica-bleforwidebandsignals.
Inthispaper,IHOSSalgorithmismodiedforthenarrowbandsignalsandthenewalgorithmiscalledasMIHOSS.
Sinceforthenarrowbandcase,sourcesignalscanonlybeobservedatsinglefrequency,MIHOSSrequirestoknowthenominalsensorpositionstosolvetheambiguityproblem.
Itisprovedthattheambiguityproblemcanbesolvediftheperturbationsarebounded.
Theupperboundfortheperturbationsisalsopresented.
BothIHOSSandMIHOSSalgorithmscaneffectivelybeusedinthearraycalibrationproblemforthesensorpositionerrorsfordifferentapplications.
SincedifferentassumptionsareusedforIHOSSandMIHOSSalgorithms,thecompari-sonbetweenthemisnotfair.
2.
PROBLEMSTATEMENTItisassumedthatthearrayiscomposedofrandomlyde-ployedMsensorsandthereareLfar-eldsources.
Twosen-sorsareselectedasthereferencesensors.
Thesensorpo-sitionsarerandomlyperturbedfromtheirnominalpositionsexceptthereferencesensors.
Thepositionsofthereferencesensorsareassumedtobeknownandthedistancebetweenthemislessthanorequaltoλ/2,whereλisthewavelengthoftheincomingsourcesignals.
Undertheseassumptions,thereceivedsignalvectorforthesensorarraycanbewrittenas,x(t)=A(Θ,P0+P)s(t)+v(t),t=1,2,.
.
.
,N(1)where,Nisthenumberofsnapshots,s(t)=[s1(t),.
.
.
,sL(t)]TistheL*1vectorofLsources,v(t)istheM*1vec-torofGaussiannoise.
Sourcesignalsareassumedtobe19thEuropeanSignalProcessingConference(EUSIPCO2011)Barcelona,Spain,August29-September2,2011EURASIP,2011-ISSN2076-1465614non-Gaussianandtheycanbecorrelatedbutnotcoherent.
Noiseisassumedtobestatisticallyindependentwiththesourcesignals.
Θ=[θ1,.
.
.
,θL]isthesourceDOAvector,P0=[p01T,.
.
.
,p0MT]TandP=[pT1,.
.
.
,pTM]Tarethenominalsensorpositionsandtheperturbationsinpositions,respec-tively.
A(Θ,P)istheM*Larraysteeringmatrix,composedof,A(Θ,P0+P)mi=expj2πλp0m,x+pm,xcosθi+p0m,y+pm,ysinθi(2)where,θiisthedirection-of-arrivalofithsourceinazimuth,p0m=[p0m,x,p0m,y]andpm=[pm,x,pm,y]arethe2Dnominalpositionofthemthsensorandthe2Dperturbationofthemthsensorposition,respectively.
Sincethepositionsofthetworeferencesensorsareknown,theirperturbationsarezero,i.
e.
,pm=0,m=1,2.
(.
)Tisthetransposeoperator.
ThegoalinthispaperistoestimatebothDOAsofLsourcesandtheperturbationparametersofM2sensors.
3.
MIHOSSALGORITHMInthissection,MIHOSSalgorithmisintroducedforasolu-tiontotheproblemdescribedinSection2.
MIHOSSalgo-rithmisbasedontheIHOSSalgorithm[1],whichusestheHOSandSOSapproachesjointly.
Thebasicdifferencebe-tweentheIHOSSandMIHOSSistheirsolutionoftheam-biguityinsensorpositions.
IHOSSalgorithmrequiresob-servationsatmultiplefrequencies.
Ontheotherhand,MI-HOSSusesthenominalsensorpositionstosolvetheambi-guityproblemandcanbeappliedfornarrowbandsignals.
3.
1HOSBasedBlindDOAEstimationIn[7],itisshownthatHOSapproachcanbeusedtondtheDOAandarraysteeringmatrixestimatesforrandomsensorgeometrieswithoutknowingthesensorpositionsexceptthetworeferencesensors.
Inthisrespectcumulantmatrixcom-posedoffourth-ordercumulantsareusedtogetherwiththeESPRITalgorithm.
Ontheotherhand,asexplainedin[1],thisapproachcanbeemployedforDOAestimationaslongasthesourcesignalsareindependent.
IHOSSalgorithm[1]overcomesthislimitationbyproposinganewcumulantma-trixestimationtechnique,whichismorerobusttothedepen-dencybetweensourcesignals,i.
e.
,C=L∑i=1A(i)1CsA(i)1HA(i)1CsA(i)2HA(i)2CsA(i)1HA(i)1CsA(i)1H(3)whereAistheestimateofthearraysteeringmatrix,A,andA(i)j=QiAq(i)jA,j∈{1,2}.
q(i)jisthecomplexcon-jugateofthejthrowofthematrixQi=IAZiA.
(.
)istheMoore-Penrosepseudoinverseoperator.
ZiistheL*Ldiagonalmatrixwhosediagonalelementsareoneexcepttheithelement.
Theithelementissettozero.
CsistheL2*L2sourcecumulantmatrixintheformof,Cs(i,j)=Cum(sk(t),sl(t),sm(t),sn(t))(4)i=L(m1)+l,1≤m,l≤Lj=L(n1)+k,1≤n,k≤LNotethatthecumulantmatrixestimatein(3)isagener-alizedcumulantmatrixestimatewhichimprovestheparame-terestimatesdependingontheaccuracyofthearraysteeringmatrixestimation.
In[1],itisshownthatiftheactualarraysteeringmatrixisknown,i.
e.
,A=A,thecumulantmatrixestimatein(3)simpliesto,C=ARHOSsAHARHOSsDAHADHRHOSsAHARHOSsAH(5)L*LdiagonalmatricesRHOSsandDaredenedas,RHOSs=diag(γ1,γ2,.
.
.
,γL)(6)D=diagej2πλΔcos(θ1),.
.
.
,ej2πλΔcos(θL)(7)whereγi=Cum(si(t),si(t),si(t),si(t))andΔ≤λ/2isthedistancebetweenthetworeferencesensors.
Thereferencesensorsareassumedtobelocatedat(0,0)and(Δ,0)onthecoordinatesystemforsimplicity.
Notethat,thecumulantmatrixin(5)isinthesameformofthecorrelationmatrixintheESPRITalgorithm.
Theonlydifferenceisthesourcecor-relationmatrixdenedforSOSisreplacedbyRHOSs.
Sincethecumulantmatrixin(5)isnotavailableinpractice,itses-timatein(3)isusedfortheparameterestimation.
TheDOAandarraysteeringmatrixestimatesarefoundfromtheeigenvaluedecompositionofC,i.
e.
,CS=SΛsasintheESPRITalgorithm.
Λsisthediagonalmatrixcom-posedoftheLlargesteigenvaluesofthematrixCand2M*LmatrixS=[ST1ST2]Tisobtainedfromtheeigenvectorscorrespondingtotheseeigenvalues.
S1andS2areM*Lma-trices.
TheDOAandthearraysteeringmatrixestimatesarefoundbyapplyingtheESPRITalgorithm,i.
e.
,θi=cos1Φ(i,i)2πΔλ(8)A=S1Ψ(9)whereΦ(i,i)isthephasetermoftheithdiagonalelementofthematrixΦ.
L*Ldiagonalmatrix,Φ,andL*Lmatrix,Ψ,arerelatedas,S1S2Ψ=ΨΦ(10)NotethatknowingthedistanceandthedirectionbetweenthetworeferencesensorsaresufcientfortheDOAestimationasin(8).
However,itisnotthecaseforthearraysteeringmatrixestimation.
IntheESPRITalgorithmthearraysteer-ingmatrixestimationisfounduptoanunknownscalefactorasin(9).
Tondthescalefactor,inadditiontothedistanceandthedirectionbetweenthetworeferencesensors,itisre-quiredtoknowoneofthereferencesensorposition.
Sinceitisassumedthattherstreferencesensorislocatedat(0,0),therstrowofthearraysteeringmatrixhastobeconsistofallones.
Then,theactualarraysteeringmatrixcanbefoundfrom(9),i.
e.
,A=AH1(11)whereH=diag(a11,a12,.
.
.
,a1L)andaijistheithrowandjthcolumnofmatrixA.
6153.
2UnambiguousSensorLocalizationOncetheDOAandarraysteeringmatrixestimationsarefound,sensorlocationscanbeestimatedusing(2).
Dueto2πambiguity,theelementsofthearraysteeringmatrixin(2),correspondingtomthsensorandithsourcecanberewrit-teninthefollowingform,am,i=ej2πλ[(p0m+pm)u(θi)λkm,i](12)where,km,iisanintegerspeciedforthemthsensorandtheithsource.
u(θi)=[cos(θi),sin(θi)]Tistheunitdirectionvectoroftheithincomingsource.
Whenalltheincomingsourcesareconsidered,thefollowingrelationcanbewritten,p0m+pmU(Θ)=λ2πΞm+λkm,1≤m≤M(13)whereΞm=[(am,1)(am,2)am,L)](14)km=[km,1km,2.
.
.
km,L](15)U(Θ)=u(θ1).
.
.
u(θL)(16)xstandsfortheestimationofxand(am,i)isthephasetermofthearraysteeringmatrixelementestimatein(12).
Thepositionperturbationofthemthsensorcaneasilybefoundfrom(13)intheleastsquaressenseas,pm(km)=λ2πΞm+λkmU(Θ)p0m,1≤m≤M(17)Notethatthepositionperturbationestimatein(17)takesdif-ferentvaluesfordifferentkmvalues.
Therefore,pm(km)val-uesareconsideredastheambiguouspositionperturbationestimatesofthemthsensor.
Ifthepositionperturbationislimited,theambiguityproblemcanbesolvedbyselectingthesensorpositionper-turbationestimatewithminimumnorm,i.
e.
,pm=argminkmpm(km)(18)TheupperboundofperturbationsforunambiguoussensorpositionestimationsisgiveninLemma-1.
Lemma-1:Letdmbetheminimumdistancebetweenac-tualandestimatedpositionperturbationofthemthsensor,i.
e.
,pm(km)pm≤dm.
Then,theambiguityprobleminsensorpositionestimationissolvedifthefollowingcondi-tionissatisedfor,1≤m≤M,pm<λ2mink(1)m=k(2)m∈kmk(1)mk(2)mU(Θ)maxmdm(19)TheproofofLemma-1isnotgivenduetospacelimita-tions.
3.
3SOS-BasedMUSICAlgorithmSensorpositionmatrixestimate,P=P0+P,isconstructedusing(18)withthenominalsensorpositionsandusedintheMUSICalgorithmtogeneratetheMUSICpseudospec-trum,i.
e.
,Γ(θ)=aH(θ,P)GGHa(θ,P)1whereGistheM*(ML)matrixwhosecolumnsarecomposedoftheeigenvectorscorrespondingtoMLsmallesteigenvaluesofthecorrelationmatrixobtainedintheSOSapproach.
TheDOAandthearraysteeringmatrixestimatesfortheSOSapproachareobtainedbyndingtheLlargestpeaksoftheMUSICpseudospectrum,i.
e.
,θiLi=1=argmaxθΓ(θ)(20)A=a(θ1,P),a(θ2,P),.
.
.
,a(θL,P)(21)3.
4TheCostFunctionandTheAlgorithmicStepsMIHOSSalgorithmiterativelyupdatestheDOAandarraysteeringmatrixestimatesusingtheHOSandSOSapproachessequentiallyassummarizedinTable1.
Thecostfunctionusedateachiterationtoselectthebestarraysteeringvec-torestimatesforeachsourceisdenedbytheMUSICpseu-dospectrum,i.
e.
,Γ(ai)=aHiGGHai1(22)whereaiarethearraysteeringvectorestimatefortheithsource.
Notethatthecostfunction,Γ(ai)isnon-negative.
Ateachiteration,n,wehaveΓ(a(n)i)≥Γ(a(n1)i)≥0.
There-fore,theproposedMIHOSSalgorithmisguaranteedtocon-vergetoacertainvalue,Γ,attheendoftheiterations.
How-ever,theconvergencetothisvaluedoesnotmeanthattheglobaloptimumisreachedasitisthegeneraldisadvantageofalliterativealgorithms[8].
4.
PERFORMANCERESULTSMIHOSSalgorithmiscomparedwiththeMUSIC[2]andsmallerrorapproximation[4],illustratedasSmallErrorinthegures,forDOAandsensorpositionestimations.
CRB[1]isalsoevaluatedforbothDOAandsensorpositionesti-mation.
WhileMIHOSSandSmallErroralgorithmsareit-erativemethods,MUSICalgorithmisnoniterativeone.
AsstatedinTable1,MIHOSSstartswiththeSOSMUSICalgo-rithmanditeratesHOSandSOSapproachestoupdatebothDOAandsensorpositionestimations.
AlsoSmallError[4]algorithmstartswithMUSICalgorithmanditerativelyup-datesbothDOAandsensorpositionestimationsusingSOSapproach.
Therefore,comparingMUSICalgorithmwithMI-HOSSandSmallErroralgorithmsshowstheeffectivenessoftheiterationprocesses.
Notethatforafaircomparison,thesensorpositionestimationalgorithmdescribedinSection3.
2isalsoappliedfortheMUSICalgorithm.
Itisassumedthattherearetwofar-eldsourcesandM=10sensors.
Eachsensorpositionexceptthetworef-erencesensorsisrandomlyselectedfromauniformdistri-butioninthedeploymentareaof2λ*2λ.
Thereferencesensorsareplacedat(0,0)and(λ/2,0).
Thepositionsofthesensorsotherthanthereferencesensorsarearbitrarilyper-turbed.
Theperturbationvaluesarerandomlyselectedwithauniformdistribution.
Fortheparameterestimation,N=1000snapshotsarecollected.
Theperformanceresultsaretheav-erageof100trials.
Ateachtrial,sourcesignals,noise,thesensorpositionsexceptthereferencesensors,theperturba-tionsandtheDOAanglesofsourcesignalsarechangedran-domly.
ThedifferencebetweentheDOAanglesofthesource616Table1:PseudocodeforMIHOSSalgorithm.
n=0.
Findtheinitialvaluesofthearraysteering1vectorforeachsource,a(0)i,withSOSapproachasin(21)usingthenominalsensorpositions.
;Termination=true.
Estimatetheproposedcumulant2matrixfromthearrayoutputanda(n)iasin(3).
Then,ndtheDOAestimates,θHOSiusing(8)andthearraysteeringmatrixAHOS,using(11),for1≤i≤L;Findthesensorpositionestimates,P=P0+P,asin3(18)using(16)and(14)withθHOSiandAHOS,for1≤i≤L;Findθ(SOS)iusingPasin(20).
Then,nda(SOS)iusing4Pandθ(SOS)iasin(21);fori=1toLdo5ifΓ(a(SOS)i)≥Γ(a(n)i)then6a(n+1)i=a(SOS)i,θ(n+1)i=θ(SOS)i,7Γ(a(n+1)i)=Γ(a(SOS)i),Termination=false;else8a(n+1)i=a(n)i,θ(n+1)i=θ(n)i;9end10end11ifTermination=falsethen12n=n+1,GotoStep2;13else14Findthenalestimateofsensorpositionsusing15θ(n)ianda(n)i,1≤i≤L;end16signalsissetto40degrees.
Thesourcesignalshaveauni-formdistributionandthenoiseisadditivewhiteGaussiananduncorrelatedwiththesourcesignals.
TheperformanceresultsfortheDOAandsensorposi-tionestimationsatdifferentSNRvaluesareillustratedinFig.
1.
Thesensorpositionperturbationislimitedto0.
1λ.
ItisseenthatbothMUSICandsmallerrorapproachalgorithm(SmallError)haveaooringeffectforbothDOAandsen-sorpositionestimations.
AsitisseeninFig.
1,SmallErroralgorithmslightlyimprovestheMUSICperformance.
ItisalsoseenthatafterapproximatelySNR=7dBMIHOSSal-gorithmsignicantlyoutperformsandcloselyfollowsCRBforbothDOAandsensorpositionestimations.
InFig.
2,theperformanceofthealgorithmsispresentedfordifferentpositionperturbations.
SNRissetto30dB.
AsitisseeninFig.
2,theparameterestimationperformanceofMIHOSSalgorithmisnotaffectedfromthevalueofpertur-bationsandcloselyfollowsCRB.
ItisalsoobservedinFig.
2-(b)that,MIHOSSalgorithmeffectivelysolvestheambigu-ityproblemuptoaperturbationvalueof0.
42λ.
Thecondi-tionpresentedinLemma-1isnotsatisedforfurtherincreaseinperturbationsandsensorpositionscannotbefoundunam-biguously.
NotethatDOAestimationisaccurateandisnotaffectedbythesensorpositionambiguityasshowninFig.
2-(a).
Thisisduetothefactthatarraysteeringmatrixesti-mateisaccuratewhilethepositionsareambiguous.
Theper-formanceofbothMUSICandSmallErroralgorithmdegradesignicantlyforthelargeperturbationvalues.
SmallError0510152025303540102101100101SNR,dBDOARMSE,(DEGREES)MUSICMIHOSSSmallErrorCRB(a)0510152025303540104103102101100SNR,dBNORMALIZEDSENSORPOSITIONRMSE,(xλ)MUSICMIHOSSSmallErrorCRB(b)Figure1:(a)DOAand(b)positionestimationRMSEvaluesfordifferentSNRvaluesandsensorpositionperturbationof0.
1λ.
algorithmslightlyoutperformsMIHOSSalgorithmonlyforverysmallperturbations(lessthan0.
01λ).
Fortheperturba-tionslessthan0.
0016λMUSICoutperformsbothMIHOSSandSmallEroralgorithmsaswellasCRB.
ThereasonforthisfactisthatiterativeprocessesinMIHOSSandSmallEr-roralgorithmsdecreasetheestimationperformancesfortheextremelysmallperturbations.
Asshownin(17),pseudoin-verseoperatorisusedforsensorpositionestimation,whichisnotanexactsolution.
Iterativelyupdatingsensorpositionsmayresultworsepositionestimationthanthenominalsensorpositionswhentheperturbationisextremelysmall.
Thesim-ilarexplanationisalsovalidfortheSmallErroralgorithm.
WhileCRBdoesnotspecifyanyalgorithmforsensorposi-tionestimation,itusesperturbationsasunknownparametersandtriesndtheminimumvarianceforbothDOAandsen-sorpositionestimationsjointly.
Hence,CRBassumesthattherearealwayserrorsinsensorpositionsevenifthereisno.
617OntheotherhandMUSICalgorithmndstheDOAandsen-sorpositionestimationsinasinglestep.
Itdoesnotassumethatthereareerrorsinsensorpositionsanddoesnotupdatetheestimationsiteratively.
103102101100102101100101102POSITIONPERTURBATION,(xλ)DOARMSE,(DEGREES)MUSICMIHOSSSmallErrorCRB(a)103102101100104103102101100POSITIONPERTURBATION,(xλ)NORMALIZEDSENSORPOSITIONRMSE,(xλ)MUSICMIHOSSSmallErrorCRB(b)Figure2:(a)DOAand(b)positionestimationRMSEvaluesfordifferentsensorpositionperturbationsandSNR=30dB.
5.
CONCLUSIONAnewmethodforjointDOAandsensorpositionestima-tionispresentedwhenthesensorsarerandomlydeployedandarbitrarilyperturbedfromtheirnominalpositions.
Itisassumedthatthedistanceandthedirectionbetweentworef-erencesensorsareknown.
HOSandSOSapproachesareem-ployedjointlyinaniterativemanner.
Theiterativemethodisguaranteedtoconverge.
Severalsimulationsaredoneanditisshownthattheproposedmethodimprovestheperfor-manceofDOAandsensorpositionestimationsignicantlyandapproachestotheCRB.
REFERENCES[1]M.
Aktas,andT.
E.
Tuncer,"IterativeHOS-SOS(IHOSS)AlgorithmforDirection-of-ArrivalEstimationandSensorLocalization,"IEEETrans.
onSignalProc.
,vol.
58,pp.
6181–6194,Dec.
2010.
[2]R.
Schmidt,"MultipleEmitterLocationandSignalPa-rameterEstimation,"Proc.
RADCSpectrumEstimationWorkshop,1979,pp.
243-258.
[3]M.
LiandY.
Lu,"SourceBearingandSteering-VectorEstimationusingPartiallyCalibratedArrays,"IEEETrans.
onAerospaceandElectronicSystems,Vol.
45,No.
4,pp.
1361-1372,October2009[4]A.
J.
WeissandB.
Friedlander,"Arrayshapecalibrationusingeigenstructuremethods,"Twenty-ThirdAsilomarConferenceonSignals,SystemsandComputers,Vol.
2,pp.
925-929,1989[5]B.
P.
FlanaganandK.
L.
Bell,"Arrayself-calibrationwithlargesensorpositionerrors,"ElsevierScienceSig-nalProcessingpp.
22012214,2001.
[6]M.
AktasandT.
E.
Tuncer,"IterativeHOS-SOS(IHOSS)BasedSensorLocalizationandDirection-Of-ArrivalEstimation,"IEEEInternationalConferenceonAcoustics,Speech,andSignalProcessing,ICASSP-2010,March2010.
[7]M.
C.
DoganandJ.
M.
Mendel,"ApplicationsofCumu-lantstoArrayProcessing-PartI:ApertureExtensionandArrayCalibration,"IEEETrans.
onSignalProc.
,Vol.
43,No.
5,pp.
1200-1216,May1995.
[8]A.
J.
WeissandB.
Friedlander,"DOAandSteeringVec-torEstimationUsingaPartiallyCalibratedArray,"IEEETrans.
onAerospaceandElectronicSystems,Vol.
32,pp.
1047-1057,1996.
618
EnginTuncerElectricalandElectronicsEngineeringDepartment,MiddleEastTechnicalUniversity,Ankara,TURKEYmaktas@eee.
metu.
edu.
tr,etuncer@metu.
edu.
trhttp://www.
eee.
metu.
edu.
tr/sam/index.
htmlABSTRACTJointdirection-of-arrival(DOA)andsensorpositionestima-tionforrandomlydeployedsensorsisintroducedinItera-tiveHOS-SOS(IHOSS)algorithm[1].
IHOSSalgorithmex-ploitstheadvantagesofbothhigher-order-statistics(HOS)andsecond-order-statistics(SOS)withaniterativealgorithmusingtworeferencesensors.
Theiterativealgorithmisguar-anteedtoconverge.
IHOSSalgorithmsolvesthepositionam-biguitybyusingsourcesignalsobservedatmultiplefrequen-ciesandhenceitisapplicableforwidebandsignals.
Inthispaper,weproposeModied-IHOSS(MIHOSS)algorithmtosolvethesameproblemfornarrowbandsignals.
InMIHOSS,itisassumedthatthenominalsensorpositionsareknown.
Itisshownthatambiguityproblemissolvedeffectivelywith-outanyassumptiononthepositionperturbations.
Theup-perboundofperturbationsforunambiguoussensorpositionestimationispresented.
TheperformanceofMIHOSSap-proachestotheCramer-Raobound(CRB)forbothDOAandpositionestimation.
1.
INTRODUCTIONThedeviationofarrayparametersfromtheassumedmodelgenerateserrorsforthearrayprocessingapplicationsinclud-ingDOAestimationandbeamforming.
Gain/phasemis-matchofantennas,mutualcouplingandantennapositioner-rorsaresomeexamplesofarraymodelingerrors.
Arraycal-ibrationisthetaskofestimatingtheerrorsinarraymodelaswellastheDOAandsourceparameters.
Inthispaper,wefo-cusonarraycalibrationforthesensorpositionerrors.
Sensorpositionerrorsareimportantinpracticalapplicationswherethesensorsaredistributedinawideareaortherearesensordisplacementsduetotheplatformasinthecaseofsensorsonthewingtipsofaplane.
Inthispaper,jointDOAandsensorpositionestimationisdoneinasettingwherethenominalsensorpositionsareknown.
Inthiscase,itisassumedthattherearetworefer-encesensorswhosepositionsareknownperfectly.
Therestofthesensorsaredistributedrandomlyinalargearea.
Whilethenominalpositionsofthedistributedsensorsareknown,thereisnoassumptionontheperturbationforthesensorpo-sitions.
Notethattheproblemdenedaboveisdifferentthanthepartiallycalibratedarrays(PCA)[3]sincethenumberofsourcesisnotrestrictedtobelessthanthenumberofrefer-encesensors.
Furthermore,thesensorpositionsareestimatedinourcaseasopposedto[3].
Intheliterature,arraycalibrationproblemforthesensorpositionerrorsisinvestigatedintwosettings,namelysmallerror[4]andlargeerrorapproximations[5].
Insmallerrorapproximation,theperturbationsareassumedtobesmallandarraycalibrationisperformedbyusingarstorderapprox-imation.
Therstorderapproximationisnotapplicableastheperturbationsareincreased.
Largeerrorapproximation[5]isproposedtocircumventthelimitationsofthesmaller-rorapproximation.
HowevertheDOAestimationproblemisconsideredforauniformcirculararrayandforsomexedsourceDOAs.
Oneofthemainproblemsinsensorpositionestimationfromtheknowledgeofsourceobserveddataistheambiguityinsensorpositions.
Ambiguityarisesduetothewraparoundinarraysteeringmatrixphaseterms.
PreviouslyIHOSSalgorithm[1],[6]ispresented,whichjointlyusesHOSandSOSapproachesiterativelyforthees-timationofbothsourceDOAsandsensorpositions.
Theit-erativeprocessisguaranteedtoconverge.
InIHOSSalgo-rithm,exceptthetworeferencesensorsthereisnoaprioriinformationaboutthesensorpositions.
Thepositionsofthetworeferencesensorsareassumedtobeknown.
IHOSSal-gorithmconsiderstheambiguityprobleminsensorpositionestimationandsolvestheproblembyusingthesourcesig-nalsobservedatmultiplefrequencies.
Henceitisapplica-bleforwidebandsignals.
Inthispaper,IHOSSalgorithmismodiedforthenarrowbandsignalsandthenewalgorithmiscalledasMIHOSS.
Sinceforthenarrowbandcase,sourcesignalscanonlybeobservedatsinglefrequency,MIHOSSrequirestoknowthenominalsensorpositionstosolvetheambiguityproblem.
Itisprovedthattheambiguityproblemcanbesolvediftheperturbationsarebounded.
Theupperboundfortheperturbationsisalsopresented.
BothIHOSSandMIHOSSalgorithmscaneffectivelybeusedinthearraycalibrationproblemforthesensorpositionerrorsfordifferentapplications.
SincedifferentassumptionsareusedforIHOSSandMIHOSSalgorithms,thecompari-sonbetweenthemisnotfair.
2.
PROBLEMSTATEMENTItisassumedthatthearrayiscomposedofrandomlyde-ployedMsensorsandthereareLfar-eldsources.
Twosen-sorsareselectedasthereferencesensors.
Thesensorpo-sitionsarerandomlyperturbedfromtheirnominalpositionsexceptthereferencesensors.
Thepositionsofthereferencesensorsareassumedtobeknownandthedistancebetweenthemislessthanorequaltoλ/2,whereλisthewavelengthoftheincomingsourcesignals.
Undertheseassumptions,thereceivedsignalvectorforthesensorarraycanbewrittenas,x(t)=A(Θ,P0+P)s(t)+v(t),t=1,2,.
.
.
,N(1)where,Nisthenumberofsnapshots,s(t)=[s1(t),.
.
.
,sL(t)]TistheL*1vectorofLsources,v(t)istheM*1vec-torofGaussiannoise.
Sourcesignalsareassumedtobe19thEuropeanSignalProcessingConference(EUSIPCO2011)Barcelona,Spain,August29-September2,2011EURASIP,2011-ISSN2076-1465614non-Gaussianandtheycanbecorrelatedbutnotcoherent.
Noiseisassumedtobestatisticallyindependentwiththesourcesignals.
Θ=[θ1,.
.
.
,θL]isthesourceDOAvector,P0=[p01T,.
.
.
,p0MT]TandP=[pT1,.
.
.
,pTM]Tarethenominalsensorpositionsandtheperturbationsinpositions,respec-tively.
A(Θ,P)istheM*Larraysteeringmatrix,composedof,A(Θ,P0+P)mi=expj2πλp0m,x+pm,xcosθi+p0m,y+pm,ysinθi(2)where,θiisthedirection-of-arrivalofithsourceinazimuth,p0m=[p0m,x,p0m,y]andpm=[pm,x,pm,y]arethe2Dnominalpositionofthemthsensorandthe2Dperturbationofthemthsensorposition,respectively.
Sincethepositionsofthetworeferencesensorsareknown,theirperturbationsarezero,i.
e.
,pm=0,m=1,2.
(.
)Tisthetransposeoperator.
ThegoalinthispaperistoestimatebothDOAsofLsourcesandtheperturbationparametersofM2sensors.
3.
MIHOSSALGORITHMInthissection,MIHOSSalgorithmisintroducedforasolu-tiontotheproblemdescribedinSection2.
MIHOSSalgo-rithmisbasedontheIHOSSalgorithm[1],whichusestheHOSandSOSapproachesjointly.
Thebasicdifferencebe-tweentheIHOSSandMIHOSSistheirsolutionoftheam-biguityinsensorpositions.
IHOSSalgorithmrequiresob-servationsatmultiplefrequencies.
Ontheotherhand,MI-HOSSusesthenominalsensorpositionstosolvetheambi-guityproblemandcanbeappliedfornarrowbandsignals.
3.
1HOSBasedBlindDOAEstimationIn[7],itisshownthatHOSapproachcanbeusedtondtheDOAandarraysteeringmatrixestimatesforrandomsensorgeometrieswithoutknowingthesensorpositionsexceptthetworeferencesensors.
Inthisrespectcumulantmatrixcom-posedoffourth-ordercumulantsareusedtogetherwiththeESPRITalgorithm.
Ontheotherhand,asexplainedin[1],thisapproachcanbeemployedforDOAestimationaslongasthesourcesignalsareindependent.
IHOSSalgorithm[1]overcomesthislimitationbyproposinganewcumulantma-trixestimationtechnique,whichismorerobusttothedepen-dencybetweensourcesignals,i.
e.
,C=L∑i=1A(i)1CsA(i)1HA(i)1CsA(i)2HA(i)2CsA(i)1HA(i)1CsA(i)1H(3)whereAistheestimateofthearraysteeringmatrix,A,andA(i)j=QiAq(i)jA,j∈{1,2}.
q(i)jisthecomplexcon-jugateofthejthrowofthematrixQi=IAZiA.
(.
)istheMoore-Penrosepseudoinverseoperator.
ZiistheL*Ldiagonalmatrixwhosediagonalelementsareoneexcepttheithelement.
Theithelementissettozero.
CsistheL2*L2sourcecumulantmatrixintheformof,Cs(i,j)=Cum(sk(t),sl(t),sm(t),sn(t))(4)i=L(m1)+l,1≤m,l≤Lj=L(n1)+k,1≤n,k≤LNotethatthecumulantmatrixestimatein(3)isagener-alizedcumulantmatrixestimatewhichimprovestheparame-terestimatesdependingontheaccuracyofthearraysteeringmatrixestimation.
In[1],itisshownthatiftheactualarraysteeringmatrixisknown,i.
e.
,A=A,thecumulantmatrixestimatein(3)simpliesto,C=ARHOSsAHARHOSsDAHADHRHOSsAHARHOSsAH(5)L*LdiagonalmatricesRHOSsandDaredenedas,RHOSs=diag(γ1,γ2,.
.
.
,γL)(6)D=diagej2πλΔcos(θ1),.
.
.
,ej2πλΔcos(θL)(7)whereγi=Cum(si(t),si(t),si(t),si(t))andΔ≤λ/2isthedistancebetweenthetworeferencesensors.
Thereferencesensorsareassumedtobelocatedat(0,0)and(Δ,0)onthecoordinatesystemforsimplicity.
Notethat,thecumulantmatrixin(5)isinthesameformofthecorrelationmatrixintheESPRITalgorithm.
Theonlydifferenceisthesourcecor-relationmatrixdenedforSOSisreplacedbyRHOSs.
Sincethecumulantmatrixin(5)isnotavailableinpractice,itses-timatein(3)isusedfortheparameterestimation.
TheDOAandarraysteeringmatrixestimatesarefoundfromtheeigenvaluedecompositionofC,i.
e.
,CS=SΛsasintheESPRITalgorithm.
Λsisthediagonalmatrixcom-posedoftheLlargesteigenvaluesofthematrixCand2M*LmatrixS=[ST1ST2]Tisobtainedfromtheeigenvectorscorrespondingtotheseeigenvalues.
S1andS2areM*Lma-trices.
TheDOAandthearraysteeringmatrixestimatesarefoundbyapplyingtheESPRITalgorithm,i.
e.
,θi=cos1Φ(i,i)2πΔλ(8)A=S1Ψ(9)whereΦ(i,i)isthephasetermoftheithdiagonalelementofthematrixΦ.
L*Ldiagonalmatrix,Φ,andL*Lmatrix,Ψ,arerelatedas,S1S2Ψ=ΨΦ(10)NotethatknowingthedistanceandthedirectionbetweenthetworeferencesensorsaresufcientfortheDOAestimationasin(8).
However,itisnotthecaseforthearraysteeringmatrixestimation.
IntheESPRITalgorithmthearraysteer-ingmatrixestimationisfounduptoanunknownscalefactorasin(9).
Tondthescalefactor,inadditiontothedistanceandthedirectionbetweenthetworeferencesensors,itisre-quiredtoknowoneofthereferencesensorposition.
Sinceitisassumedthattherstreferencesensorislocatedat(0,0),therstrowofthearraysteeringmatrixhastobeconsistofallones.
Then,theactualarraysteeringmatrixcanbefoundfrom(9),i.
e.
,A=AH1(11)whereH=diag(a11,a12,.
.
.
,a1L)andaijistheithrowandjthcolumnofmatrixA.
6153.
2UnambiguousSensorLocalizationOncetheDOAandarraysteeringmatrixestimationsarefound,sensorlocationscanbeestimatedusing(2).
Dueto2πambiguity,theelementsofthearraysteeringmatrixin(2),correspondingtomthsensorandithsourcecanberewrit-teninthefollowingform,am,i=ej2πλ[(p0m+pm)u(θi)λkm,i](12)where,km,iisanintegerspeciedforthemthsensorandtheithsource.
u(θi)=[cos(θi),sin(θi)]Tistheunitdirectionvectoroftheithincomingsource.
Whenalltheincomingsourcesareconsidered,thefollowingrelationcanbewritten,p0m+pmU(Θ)=λ2πΞm+λkm,1≤m≤M(13)whereΞm=[(am,1)(am,2)am,L)](14)km=[km,1km,2.
.
.
km,L](15)U(Θ)=u(θ1).
.
.
u(θL)(16)xstandsfortheestimationofxand(am,i)isthephasetermofthearraysteeringmatrixelementestimatein(12).
Thepositionperturbationofthemthsensorcaneasilybefoundfrom(13)intheleastsquaressenseas,pm(km)=λ2πΞm+λkmU(Θ)p0m,1≤m≤M(17)Notethatthepositionperturbationestimatein(17)takesdif-ferentvaluesfordifferentkmvalues.
Therefore,pm(km)val-uesareconsideredastheambiguouspositionperturbationestimatesofthemthsensor.
Ifthepositionperturbationislimited,theambiguityproblemcanbesolvedbyselectingthesensorpositionper-turbationestimatewithminimumnorm,i.
e.
,pm=argminkmpm(km)(18)TheupperboundofperturbationsforunambiguoussensorpositionestimationsisgiveninLemma-1.
Lemma-1:Letdmbetheminimumdistancebetweenac-tualandestimatedpositionperturbationofthemthsensor,i.
e.
,pm(km)pm≤dm.
Then,theambiguityprobleminsensorpositionestimationissolvedifthefollowingcondi-tionissatisedfor,1≤m≤M,pm<λ2mink(1)m=k(2)m∈kmk(1)mk(2)mU(Θ)maxmdm(19)TheproofofLemma-1isnotgivenduetospacelimita-tions.
3.
3SOS-BasedMUSICAlgorithmSensorpositionmatrixestimate,P=P0+P,isconstructedusing(18)withthenominalsensorpositionsandusedintheMUSICalgorithmtogeneratetheMUSICpseudospec-trum,i.
e.
,Γ(θ)=aH(θ,P)GGHa(θ,P)1whereGistheM*(ML)matrixwhosecolumnsarecomposedoftheeigenvectorscorrespondingtoMLsmallesteigenvaluesofthecorrelationmatrixobtainedintheSOSapproach.
TheDOAandthearraysteeringmatrixestimatesfortheSOSapproachareobtainedbyndingtheLlargestpeaksoftheMUSICpseudospectrum,i.
e.
,θiLi=1=argmaxθΓ(θ)(20)A=a(θ1,P),a(θ2,P),.
.
.
,a(θL,P)(21)3.
4TheCostFunctionandTheAlgorithmicStepsMIHOSSalgorithmiterativelyupdatestheDOAandarraysteeringmatrixestimatesusingtheHOSandSOSapproachessequentiallyassummarizedinTable1.
Thecostfunctionusedateachiterationtoselectthebestarraysteeringvec-torestimatesforeachsourceisdenedbytheMUSICpseu-dospectrum,i.
e.
,Γ(ai)=aHiGGHai1(22)whereaiarethearraysteeringvectorestimatefortheithsource.
Notethatthecostfunction,Γ(ai)isnon-negative.
Ateachiteration,n,wehaveΓ(a(n)i)≥Γ(a(n1)i)≥0.
There-fore,theproposedMIHOSSalgorithmisguaranteedtocon-vergetoacertainvalue,Γ,attheendoftheiterations.
How-ever,theconvergencetothisvaluedoesnotmeanthattheglobaloptimumisreachedasitisthegeneraldisadvantageofalliterativealgorithms[8].
4.
PERFORMANCERESULTSMIHOSSalgorithmiscomparedwiththeMUSIC[2]andsmallerrorapproximation[4],illustratedasSmallErrorinthegures,forDOAandsensorpositionestimations.
CRB[1]isalsoevaluatedforbothDOAandsensorpositionesti-mation.
WhileMIHOSSandSmallErroralgorithmsareit-erativemethods,MUSICalgorithmisnoniterativeone.
AsstatedinTable1,MIHOSSstartswiththeSOSMUSICalgo-rithmanditeratesHOSandSOSapproachestoupdatebothDOAandsensorpositionestimations.
AlsoSmallError[4]algorithmstartswithMUSICalgorithmanditerativelyup-datesbothDOAandsensorpositionestimationsusingSOSapproach.
Therefore,comparingMUSICalgorithmwithMI-HOSSandSmallErroralgorithmsshowstheeffectivenessoftheiterationprocesses.
Notethatforafaircomparison,thesensorpositionestimationalgorithmdescribedinSection3.
2isalsoappliedfortheMUSICalgorithm.
Itisassumedthattherearetwofar-eldsourcesandM=10sensors.
Eachsensorpositionexceptthetworef-erencesensorsisrandomlyselectedfromauniformdistri-butioninthedeploymentareaof2λ*2λ.
Thereferencesensorsareplacedat(0,0)and(λ/2,0).
Thepositionsofthesensorsotherthanthereferencesensorsarearbitrarilyper-turbed.
Theperturbationvaluesarerandomlyselectedwithauniformdistribution.
Fortheparameterestimation,N=1000snapshotsarecollected.
Theperformanceresultsaretheav-erageof100trials.
Ateachtrial,sourcesignals,noise,thesensorpositionsexceptthereferencesensors,theperturba-tionsandtheDOAanglesofsourcesignalsarechangedran-domly.
ThedifferencebetweentheDOAanglesofthesource616Table1:PseudocodeforMIHOSSalgorithm.
n=0.
Findtheinitialvaluesofthearraysteering1vectorforeachsource,a(0)i,withSOSapproachasin(21)usingthenominalsensorpositions.
;Termination=true.
Estimatetheproposedcumulant2matrixfromthearrayoutputanda(n)iasin(3).
Then,ndtheDOAestimates,θHOSiusing(8)andthearraysteeringmatrixAHOS,using(11),for1≤i≤L;Findthesensorpositionestimates,P=P0+P,asin3(18)using(16)and(14)withθHOSiandAHOS,for1≤i≤L;Findθ(SOS)iusingPasin(20).
Then,nda(SOS)iusing4Pandθ(SOS)iasin(21);fori=1toLdo5ifΓ(a(SOS)i)≥Γ(a(n)i)then6a(n+1)i=a(SOS)i,θ(n+1)i=θ(SOS)i,7Γ(a(n+1)i)=Γ(a(SOS)i),Termination=false;else8a(n+1)i=a(n)i,θ(n+1)i=θ(n)i;9end10end11ifTermination=falsethen12n=n+1,GotoStep2;13else14Findthenalestimateofsensorpositionsusing15θ(n)ianda(n)i,1≤i≤L;end16signalsissetto40degrees.
Thesourcesignalshaveauni-formdistributionandthenoiseisadditivewhiteGaussiananduncorrelatedwiththesourcesignals.
TheperformanceresultsfortheDOAandsensorposi-tionestimationsatdifferentSNRvaluesareillustratedinFig.
1.
Thesensorpositionperturbationislimitedto0.
1λ.
ItisseenthatbothMUSICandsmallerrorapproachalgorithm(SmallError)haveaooringeffectforbothDOAandsen-sorpositionestimations.
AsitisseeninFig.
1,SmallErroralgorithmslightlyimprovestheMUSICperformance.
ItisalsoseenthatafterapproximatelySNR=7dBMIHOSSal-gorithmsignicantlyoutperformsandcloselyfollowsCRBforbothDOAandsensorpositionestimations.
InFig.
2,theperformanceofthealgorithmsispresentedfordifferentpositionperturbations.
SNRissetto30dB.
AsitisseeninFig.
2,theparameterestimationperformanceofMIHOSSalgorithmisnotaffectedfromthevalueofpertur-bationsandcloselyfollowsCRB.
ItisalsoobservedinFig.
2-(b)that,MIHOSSalgorithmeffectivelysolvestheambigu-ityproblemuptoaperturbationvalueof0.
42λ.
Thecondi-tionpresentedinLemma-1isnotsatisedforfurtherincreaseinperturbationsandsensorpositionscannotbefoundunam-biguously.
NotethatDOAestimationisaccurateandisnotaffectedbythesensorpositionambiguityasshowninFig.
2-(a).
Thisisduetothefactthatarraysteeringmatrixesti-mateisaccuratewhilethepositionsareambiguous.
Theper-formanceofbothMUSICandSmallErroralgorithmdegradesignicantlyforthelargeperturbationvalues.
SmallError0510152025303540102101100101SNR,dBDOARMSE,(DEGREES)MUSICMIHOSSSmallErrorCRB(a)0510152025303540104103102101100SNR,dBNORMALIZEDSENSORPOSITIONRMSE,(xλ)MUSICMIHOSSSmallErrorCRB(b)Figure1:(a)DOAand(b)positionestimationRMSEvaluesfordifferentSNRvaluesandsensorpositionperturbationof0.
1λ.
algorithmslightlyoutperformsMIHOSSalgorithmonlyforverysmallperturbations(lessthan0.
01λ).
Fortheperturba-tionslessthan0.
0016λMUSICoutperformsbothMIHOSSandSmallEroralgorithmsaswellasCRB.
ThereasonforthisfactisthatiterativeprocessesinMIHOSSandSmallEr-roralgorithmsdecreasetheestimationperformancesfortheextremelysmallperturbations.
Asshownin(17),pseudoin-verseoperatorisusedforsensorpositionestimation,whichisnotanexactsolution.
Iterativelyupdatingsensorpositionsmayresultworsepositionestimationthanthenominalsensorpositionswhentheperturbationisextremelysmall.
Thesim-ilarexplanationisalsovalidfortheSmallErroralgorithm.
WhileCRBdoesnotspecifyanyalgorithmforsensorposi-tionestimation,itusesperturbationsasunknownparametersandtriesndtheminimumvarianceforbothDOAandsen-sorpositionestimationsjointly.
Hence,CRBassumesthattherearealwayserrorsinsensorpositionsevenifthereisno.
617OntheotherhandMUSICalgorithmndstheDOAandsen-sorpositionestimationsinasinglestep.
Itdoesnotassumethatthereareerrorsinsensorpositionsanddoesnotupdatetheestimationsiteratively.
103102101100102101100101102POSITIONPERTURBATION,(xλ)DOARMSE,(DEGREES)MUSICMIHOSSSmallErrorCRB(a)103102101100104103102101100POSITIONPERTURBATION,(xλ)NORMALIZEDSENSORPOSITIONRMSE,(xλ)MUSICMIHOSSSmallErrorCRB(b)Figure2:(a)DOAand(b)positionestimationRMSEvaluesfordifferentsensorpositionperturbationsandSNR=30dB.
5.
CONCLUSIONAnewmethodforjointDOAandsensorpositionestima-tionispresentedwhenthesensorsarerandomlydeployedandarbitrarilyperturbedfromtheirnominalpositions.
Itisassumedthatthedistanceandthedirectionbetweentworef-erencesensorsareknown.
HOSandSOSapproachesareem-ployedjointlyinaniterativemanner.
Theiterativemethodisguaranteedtoconverge.
Severalsimulationsaredoneanditisshownthattheproposedmethodimprovestheperfor-manceofDOAandsensorpositionestimationsignicantlyandapproachestotheCRB.
REFERENCES[1]M.
Aktas,andT.
E.
Tuncer,"IterativeHOS-SOS(IHOSS)AlgorithmforDirection-of-ArrivalEstimationandSensorLocalization,"IEEETrans.
onSignalProc.
,vol.
58,pp.
6181–6194,Dec.
2010.
[2]R.
Schmidt,"MultipleEmitterLocationandSignalPa-rameterEstimation,"Proc.
RADCSpectrumEstimationWorkshop,1979,pp.
243-258.
[3]M.
LiandY.
Lu,"SourceBearingandSteering-VectorEstimationusingPartiallyCalibratedArrays,"IEEETrans.
onAerospaceandElectronicSystems,Vol.
45,No.
4,pp.
1361-1372,October2009[4]A.
J.
WeissandB.
Friedlander,"Arrayshapecalibrationusingeigenstructuremethods,"Twenty-ThirdAsilomarConferenceonSignals,SystemsandComputers,Vol.
2,pp.
925-929,1989[5]B.
P.
FlanaganandK.
L.
Bell,"Arrayself-calibrationwithlargesensorpositionerrors,"ElsevierScienceSig-nalProcessingpp.
22012214,2001.
[6]M.
AktasandT.
E.
Tuncer,"IterativeHOS-SOS(IHOSS)BasedSensorLocalizationandDirection-Of-ArrivalEstimation,"IEEEInternationalConferenceonAcoustics,Speech,andSignalProcessing,ICASSP-2010,March2010.
[7]M.
C.
DoganandJ.
M.
Mendel,"ApplicationsofCumu-lantstoArrayProcessing-PartI:ApertureExtensionandArrayCalibration,"IEEETrans.
onSignalProc.
,Vol.
43,No.
5,pp.
1200-1216,May1995.
[8]A.
J.
WeissandB.
Friedlander,"DOAandSteeringVec-torEstimationUsingaPartiallyCalibratedArray,"IEEETrans.
onAerospaceandElectronicSystems,Vol.
32,pp.
1047-1057,1996.
618
- PROBLEMeee258.com相关文档
- genericpatheee258.com
- 化学eee258.com
- VLDBJournal2(1):75-111
- 废物eee258.com
- "高层动态","时间","领导人","事件","链接"
- careeee258.com
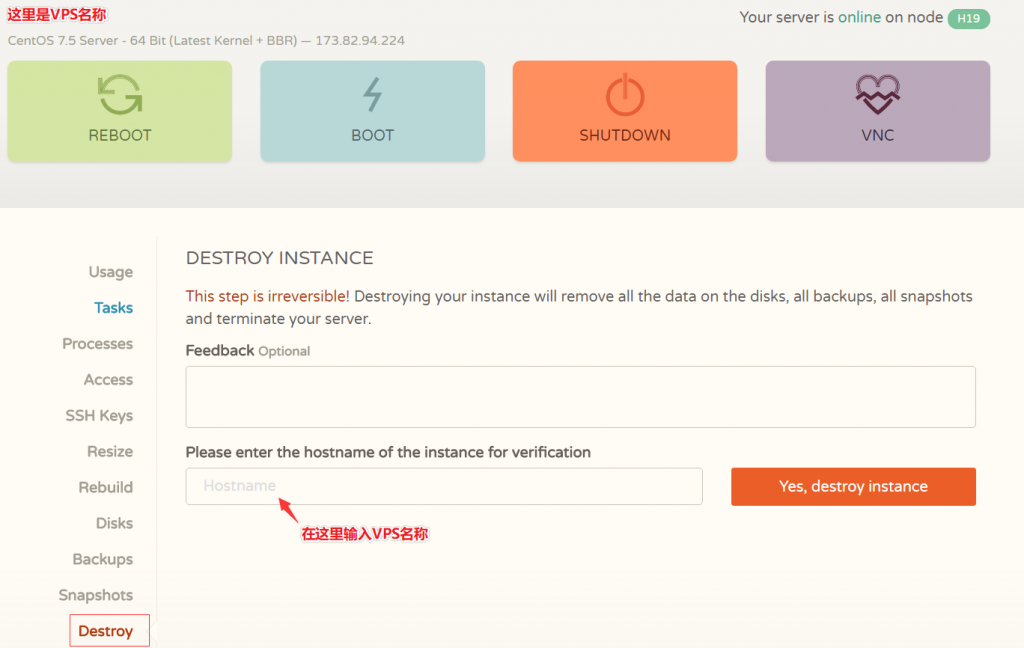
Hostodo商家提供两年大流量美国VPS主机 可选拉斯维加斯和迈阿密
Hostodo商家算是一个比较小众且运营比较久的服务商,而且还是率先硬盘更换成NVMe阵列的,目前有提供拉斯维加斯和迈阿密两个机房。看到商家这两年的促销套餐方案变化还是比较大的,每个月一般有这么两次的促销方案推送,可见商家也在想着提高一些客户量。毕竟即便再老的服务商,你不走出来让大家知道,迟早会落寞。目前,Hostodo有提供两款大流量的VPS主机促销,机房可选拉斯维加斯和迈阿密两个数据中心,且都...
CloudCone2核KVM美国洛杉矶MC机房机房2.89美元/月,美国洛杉矶MC机房KVM虚拟架构2核1.5G内存1Gbps带宽,国外便宜美国VPS七月特价优惠
近日CloudCone发布了七月的特价便宜优惠VPS云服务器产品,KVM虚拟架构,性价比最高的为2核心1.5G内存1Gbps带宽5TB月流量,2.89美元/月,稳定性还是非常不错的,有需要国外便宜VPS云服务器的朋友可以关注一下。CloudCone怎么样?CloudCone服务器好不好?CloudCone值不值得购买?CloudCone是一家成立于2017年的美国服务器提供商,国外实力大厂,自己开...
新版本Apache HTTP Server 2.4.51发布更新(有安全漏洞建议升级)
今天中午的时候看到群里网友在讨论新版本的Apache HTTP Server 2.4.51发布且建议更新升级,如果有服务器在使用较早版本的话可能需要升级安全,这次的版本中涉及到安全漏洞的问题。Apache HTTP 中2.4.50的修复补丁CVE-2021-41773 修复不完整,导致新的漏洞CVE-2021-42013。攻击者可以使用由类似别名的指令配置将URL映射到目录外的文件的遍历攻击。这里...
eee258.com为你推荐
-
openeuleropen与close的区别及用法百度关键词价格查询百度关键词排名价格是多少haole16.com高手们帮我看看我的新网站WWW.16mngt.com怎么不被收录啊?www.vtigu.com如图,已知四边形ABCD是平行四边形,下列条件:①AC=BD,②AB=AD,③∠1=∠2④AB⊥BC中,能说明平行四边形www.544qq.COM跪求:天时达T092怎么下载QQbbs2.99nets.com让(bbs www)*****.cn进入同一个站kb123.net股市里的STAQ、NET市场是什么?dpscyclewow3.13术士的PVE的命中多少够了?朴容熙这个人男的女的,哪国人。叫什么。铂金血痕“斑斑的血痕”是什么意思?