程序ios10
CNCSeriesKND—1000M/M4铣、钻、镗床用数控系统用户手册北京凯恩帝数控技术公司-2-目录第一篇概述篇1概要…1-11.
1CNC机床的一般操作…1-11.
2阅读说明书注意事项…1-1第二篇编程篇1概要…1-11.
1刀具沿着工件的形状运动插补功能…1-11.
2进给进给功能…1-21.
3加工图纸和刀具的运动…1-21.
4切削速度主轴功能…1-51.
5各种加工时选用的刀具刀具功能…1-51.
6各种功能操作指令—辅助功能…1-51.
7程序的构成…1-61.
8刀具形状和刀具加工刀具长度补偿功能…1-71.
9刀具移动的范围行程校验…1-82控制轴…2-12.
1控制轴数…2-12.
2设定单位…2-12.
3最大行程…2-13准备功能…3-14插补功能…4-14.
1定位(G00)4-14.
2直线插补(G01)4-14.
3圆弧插补(G02,G03)4-24.
4螺旋线机能…4-45进给功能…5-15.
1快速进给…5-15.
2切削进给…5-15.
3自动加减速…5-15.
4程序段拐角处的速度控制…5-25.
5暂停(G04)5-36参考点…6-16.
1自动返回参考点(G28,G29)6-17坐标系…7-1-3-7.
1零件坐标系的设定(G92)7-17.
2平面选择(G17,G18,G19)7-28坐标值和尺寸…8-18.
1绝对值指令和增量值指令(G90,G91)8-18.
2英制与公制的转换(G20,G21)8-18.
3小数点编程…8-29主轴功能(S功能)9-19.
1S两位数…9-19.
2S四,五位数(模拟主轴)9-19.
3模拟主轴自动换档…9-210刀具功能10-110.
1松拉刀控制机能…9-111辅助功能11-111.
1辅助功能(M功能)11-111.
2辅助机能参数11-311.
3与辅助机能有关的报警11-412程序的构成12-112.
1程序12-112.
2程序结束12-612.
3文件结束12-613简化编程功能13-113.
1固定循环(G73,G74,G76,G80~89)13-114补偿功能14-114.
1刀具长度补偿(G43,G44,G49)14-114.
2刀具半径补偿B(G39~G42)14-314.
3刀具半径补偿C(G40~G42)14-1014.
3.
1刀具半径补偿机能…14-1014.
3.
2补偿量(H码)14-1014.
3.
3补偿向量14-1114.
3.
4平面选择及向量14-1114.
3.
5G40,G41及G4214-1114.
3.
6刀具半径补偿C的详细说明14-1314.
4偏置量的程序输入(G10)14-3515测量机能15-115.
1跳跃机能(G31)15-116工件坐标系选择16-116.
1工件坐标系(G54~G59)16-117用户宏程序17-117.
1用户宏指令17-117.
2用户宏程序本体17-117.
3用户宏程序实例17-8-4-18攻丝机能(G93)18-1第三篇操作篇1概要…1-11.
1手动操作…1-11.
2刀具按程序移动自动运转…1-21.
3自动运转的操作…1-31.
4程序调试…1-31.
5程序的编辑…1-51.
6数据的显示及设定…1-51.
7显示…1-81.
8数据的输入输出1-102操作面板说明…2-12.
1LCD/MDI面板…2-12.
2机床附加操作面板…2-43电源的接通和切断…3-13.
1接通电源…3-13.
2切断电源…3-14手动操作…4-14.
1手动返回参考点…4-14.
2手动连续进给…4-14.
3单步进给…4-34.
4手轮进给…4-44.
5手动程序回零方式…4-54.
6手动绝对值开关…4-54.
7手动辅助机能操作…4-75自动运行…5-15.
1运转方式…5-15.
2自动运转的启动…5-35.
3自动运转的执行…5-35.
4自动运转的停止…5-36试运转…6-16.
1全轴机床锁住…6-16.
2辅助功能锁住…6-16.
3进给速度倍率…6-16.
4快速进给倍率…6-26.
5模拟主轴倍率…6-26.
6空运转…6-26.
7单程序段…6-36.
8进给保持后或停止后的再启动…6-3-5-6.
9跳过任选程序段…6-37安全操作…7-17.
1急停…7-17.
2超程…7-18报警处理…8-19程序存储、编辑…9-19.
1程序存储、编辑操作前的准备…9-19.
2把程序存入存储器中…9-19.
3把由多个程序组成的一个文件的内容存到存储器中…9-19.
4程序检索…9-29.
5程序的删除…9-29.
6删除全部程序…9-29.
7程序的输出…9-29.
8全部程序的输出…9-39.
9顺序号检索…9-39.
10存储器中存储的程序和编程器中程序的比较9-49.
11字的插入、修改、删除9-49.
12顺序号的自动插入9-89.
13存储程序的个数9-89.
14存储容量9-810数据的显示、设定10-110.
1补偿量10-110.
2设置参数的设定10-210.
3用户宏变量的显示及设定10-410.
4参数10-510.
5螺距误差补偿数据10-610.
6诊断及PLC参数…10-710.
7机床软操作面板的显示及设定(软体键'机床/索引'10-811显示11-111.
1状态显示11-111.
2键入数据显示11-111.
3程序号、顺序号的显示11-111.
4程序存储器使用量的显示11-211.
5指令值的显示(软体键'程序'11-211.
6现在位置的显示(软体键'位置'11-311.
7加工时间、零件数显示11-511.
8报警显示(软体键'报警'11-511.
9索引内容的显示(软体键'索引'11-612数据的输出及电子盘12-1-6-12.
1数据输出12-112.
2电子盘12-213图形功能13-113.
1图形参数设定13-213.
2图形参数的含义说明13-313.
3刀具路径的描述13-413.
4例(二维时)13-514与驱动有关的特性说明14-114.
1切削速度上限14-114.
2快速移动速度的设定14-114.
3电子齿轮比的设置14-114.
4升、降速时间常数的设定14-214.
5参数设定14-214.
6驱动器报警14-315几点说明15-115.
1标准出厂参数的设置及存储器清除15-115.
2不检查超程15-115.
3间隙补偿说明15-115.
4键盘及输入信号滤波15-115.
5开机不进入正常的画面15-115.
6ROM奇偶报警,开机时CMOS数据丢失,RAM检查…………………15-1第四篇连接篇1系统结构…1-11.
1系统组成…1-11.
2安装尺寸…1-21.
3附加操作面板尺寸…1-32内部连接…2-12.
1内部连接图…2-12.
2电源插座信号排列…2-22.
3主板设定开关的说明…2-33外部连接…3-13.
1系统外部连接框图…3-13.
1.
1配步进机时的连接图…3-13.
1.
2配数字交流伺服时的连接图…3-23.
2CNC到驱动器的接口信号3-33.
2.
1接口信号逻辑图3-33.
2.
2连接器信号表3-43.
2.
3信号详细说明3-43.
2.
4电缆制作说明…3-7-7-3.
3RS232-C标准串行接口3-93.
4模拟主轴接口的连接3-93.
5附加操作面板的连接3-103.
5.
1连接器信号表…3-103.
5.
2信号说明…3-103.
5.
3信号连接示意图…3-113.
6分离操作盒接口的连接…3-123.
7主轴位置编码器的连接(G93攻丝用)3-134机床接口…4-14.
1输入信号接口说明…4-14.
1.
1输入信号A…4-14.
1.
2输入信号B…4-14.
2输出信号接口说明…4-24.
2.
1达林顿管输出有关参数4-24.
2.
2输出驱动继电器回路4-34.
2.
3输出驱动指示灯4-34.
3输入输出信号表…4-44.
3.
1输入信号诊断表4-44.
3.
2输出信号诊断表4-64.
3.
3输入输出信号的插座管脚排列4-74.
4输入输出信号说明…4-74.
4.
1输入信号4-74.
4.
2输出信号…4-104.
4.
3M代码电平/脉冲输出说明4-12第五篇附录篇附录1关于记忆型螺距误差补偿功能…1-1附录2G功能一览表2-1附录3指令值范围一览表3-1附录4二,十进制转换表4-1附录5报警一览表5-1附录6电源接通及复位时的状态6-1附录7参数一览表7-1附录8PLC参数及诊断一览表…8-1附录9操作一览表9-1附录10规格一览表…10-1附录11CNC状态的诊断信息…11-1附录12K1000M4轴系统补充说明…12-1附录13通讯软件操作说明…13-1Ⅰ概述篇-1(概要)1-0第一篇概述篇Ⅰ概述篇-1(概要)1-1第一篇概述篇1.
概要K1000M采用32位处理器实现高速、高精度控制.
屏幕为分辨率640*480的彩色/单色7.
5英寸液晶显示器.
主板采用六层线路板,表贴元件,定制式FPGA,集成度高,整机工艺结构合理,抗干扰能力强,可靠性高.
全中文操作界面,完整的帮助信息,操作更方便.
采用国际标准的G指令,与FANUC系统指令兼容.
全新模具面板,国际流行色,外形美观大方.
超强程序指令处理能力,达到10000条/18秒,可实现高速小线段加工.
具有丝杆螺距误差补偿功能.
高速DNC加工,传输速率达到115200BPS,同时配有大容量程序缓存.
采用电子盘技术,数据多个位置保存,出错后可快速恢复.
海量程序存储器(640K字节).
DI/DO可通过CAN总线任意扩展.
(开发中)系统配置U盘接口,实现系统与U盘之间的程序互存,以及读取U盘程序进行加工.
(开发中)本手册介绍了钻、镗、铣床及加工中心用的KND1000M数控系统的编程、操作及连接.
本手册记述了KND1000M的全部选择功能,在附录的"规格一览表"中还介绍了CNC系统具有的各种功能.
至于机床的数控装置上实际所具有的选择功能,还要参照各机床厂家发行的说明书.
另外,机床操作面板的规格、使用方法也可能有所不同,请务必参照机床厂家发行的说明书.
1.
1CNC机床的一般操作用CNC机床加工零件时,首先要编制程序,然后用该程序控制CNC机床.
(1)首先,根据加工图纸编制零件加工程序.
说明书中"Ⅱ.
编程篇"一篇中详细地介绍了编程方法.
(2)CNC读入程序后,把零件和刀具装在机床上,刀具按着程序运动,加工实际零件.
在"Ⅲ操作篇"一篇中,详细地记述了如何操作.
加工图纸加工程序数控系统机床见'编程篇'见'操作篇'磁盘MDI/LCDⅠ概述篇-1(概要)1-21.
2阅读说明书注意事项(1)数控机床的机能不仅由数控系统来决定,而且是由机床、强电、驱动系统等组合一起的机能决定的,而这组合后的机能、编程、操作的详细情况,在与机床结合后才决定.
CNC系统由此图可知,CNC系统由基本功能、选择机能、接口部分等组成,对不同的机床,其选择机能、接口设计不尽相同,所以对机床使用者来讲,请参阅机床厂家发行的说明书.
(2)如上所述,KND1000系列数控系统是一个通用的数控系统,本说明书是对CNC具有的各种功能进行的说明,对机床设计者来讲,除了阅读本说明书以外,还要与连接说明书等结合起来后,才能全面了解该系统的功能.
只有在此基础上,才能最佳地将这些技能运用,使机床达最佳机能.
此外,此说明只是对功能的描述,对某种功能来讲,在不同的机床上也不相同,对具体使用的范例不可能一一例举,所以请务必参考机床厂家的说明书.
(3)K1000M系统有以下品种:K1000MA:通用3轴系统,采用7.
4英寸黑白液晶屏.
K1000MB:通用3轴系统,采用7.
5英寸彩色液晶屏.
K1000M4A:通用4轴系统,采用7.
4英寸黑白液晶屏.
K1000M4B:通用4轴系统,采用7.
5英寸彩色液晶屏.
由于功能不同,订购的费用也不一样,详细情况请参照KND公司的订货清单.
(4)本说明书以系统主板版本0012I-W01Z-0106、系统软件版本K1000MI060105.
12.
22为标准进行编写.
(5)其它版本软件的系统的不同之处请参看"补充说明书".
(6)K1000M4轴系统补充说明在"附录篇-12".
(7)若需自行编制PLC程序,请仔细阅读《PLC用户手册》.
重要提示:K1000M系统有电子盘功能,当机床调试完毕,请将系统当前数据保存在电子盘中.
这样,当系统当前数据丢失、紊乱,不能工作时,可使系统很快恢复正常.
具体操作方法参见"操作篇12-2".
能N能1CNC基本功能接口选择机.
.
.
选择机Ⅱ编程篇-1(概要)1-0第二篇编程篇Ⅱ编程篇-1(概要)1-1第二篇编程篇1.
概要1.
1刀具沿着工件的形状运动插补功能(参照Ⅱ.
4)刀具沿着构成工件的直线和圆弧运动.
(注)1.
1.
1刀具沿着直线运动1.
1.
2刀具沿着圆弧运动把刀具这样沿着直线、圆弧运动的功能称为插补功能.
编程指令G01,G02…等被称为准备功能,用于指示数控装置进行何种插补.
注:在实际机床中,有可能刀具不运动,而工作台运动.
在本说明书中,假定刀具相对工件运动来进行说程序指令G01Y_;X_Y_;工件刀具程序指令G03X_Y_R_;工件刀具a)沿着直线运动G01Y__;X__Y__;b)沿着圆弧运动G03X__Y__R__;插补X轴(电机)Y轴(电机)刀具运动a)沿直线运动b)沿圆弧运动Ⅱ编程篇-1(概要)1-2明.
1.
2进给进给功能(参照Ⅱ.
5)为了切削零件,用指定的速度使刀具运动称为进给,进给速度用数值指令.
例如,让刀具以150毫米/分进给时,程序指令为:F150.
0.
决定进给速度的功能称为进给功能.
1.
3加工图纸和刀具的运动1.
3.
1参考点(特定的机械点)在CNC机床上,设计有特定的机械装置,通常在这个位置换刀和进行后面将要讲述的坐标系设定,这个位置称为参考点.
使刀具移动到参考点,有下面两种方法:(1)手动返回参考点(2)自动返回参考点1.
3.
2加工图纸上的坐标系和CNC指令的坐标系工件刀具工作台F毫米/分工件XZYZYXXZY程序加工图纸坐标系数控系统指令机床刀具工件工作台刀具参考点Ⅱ编程篇-1(概要)1-3坐标系根据设定的地方不同,有下面两种:(1)加工图纸上的坐标系:这个坐标系画在加工图纸上,程序中的数据使用这个坐标系的坐标值.
(2)CNC指令的坐标系:这个坐标系实际设定在机床工作台上.
根据程序,指令从现在的刀具位置到要设定的坐标系原点的距离,这样就设定了工作台上的坐标系.
工件一装在工作台上,就产生了这两个坐标系的相对关系.
刀具在CNC指令的坐标系上,按照加工图纸上坐标系的指令程序把工件切削成图纸上的形状,因此,要把零件正确地加工出图纸所示的形状,必须把这两个坐标系确定在同一位置上.
确定这两个坐标系同一位置的方法,可根据零件的形状、加工数量等采用不同的方法.
(Ⅰ)用零件的基准点(Ⅱ)把零件直接装在夹具上时把刀具中心移动对准零件基准点,在此把刀具中心位于参考点,在这个位位置用CNC指令设定坐标系置设定CNC指令的坐标系(夹具事先坐标原点YXXY工件机床CNC指定的坐标系设定在工作台上加工图纸上的坐标系设定在零件上刀具工件基准点固定距离参考点工件夹具200300刀具的现在位置O到要设定的坐标原点的距离Ⅱ编程篇-1(概要)1-4装在距参考点一定距离的位置上).
(Ⅲ)零件装在随行夹具上,然后再一起装在夹具上的情况1.
3.
3刀具运动指令尺寸的表示方法绝对值和增量值指令(参照Ⅱ.
8)刀具运动指令的坐标值有绝对值和增量值两种.
(1)绝对坐标值"距坐标系原点的距离"即刀具要移动到的坐标位置.
刀具从A点移动到B点,使用B点的坐标值,其指令如下:G90X10.
0Y30.
0Z20.
0;(2)增量坐标值指令从前一个位置到下一个位置的距离.
刀具从A点移动到B点,其指令如下:XYZ刀具A(15,60,40)B(10,30,20)XYZ刀具BA304010随行夹具工件工件夹具(工件夹具安装及CNC指令的坐标系的设定与(2)的情况相同)Ⅱ编程篇-1(概要)1-5G91X40.
0Y-30.
0Z-10.
0;1.
4切削速度主轴功能(参照Ⅱ.
9)把切削工件时刀具相对工件的速度称为切削速度.
CNC可以用主轴转速RPM来指令这个切削速度.
例如:刀具直径为100毫米,切削速度用80米/分加工时,根据主轴转速N=1000V/πD的关系,主轴转速约250RPM,指令为:S250;把有关主轴转速的指令称为主轴功能.
1.
5各种加工时选用的刀具刀具功能(参照Ⅱ.
10)进行孔加工、攻丝、镗削、铣削等各种加工时,要选择必要的刀具.
各种刀具都带有刀号,当程序中指定这个刀具号时,就选择对应的刀具.
例如某孔加工用刀具为01号,在刀库01号的位置上,选择了刀具,此时指令为:T01;就可以选出这把刀.
把这个功能称为刀具功能.
1.
6各种功能操作指令-辅助功能(参照Ⅱ.
11)实际上,刀具开始加工工件时,要使主轴回转,供给冷却液,为此必须控制机床主轴电机和冷却油泵的开/关.
RPM直径工件刀具V(毫米/分)0102刀具号刀库Ⅱ编程篇-1(概要)1-6这些指令机床开/关动作的功能称为辅助功能,用M代码指令.
例如:若指令M03,主轴就以指令的回转速度顺时针回转.
1.
7程序的构成(参照Ⅱ.
12)为了使机床运动,给予CNC指令的集合称为程序.
按着指令使刀具沿着直线、圆弧运动,或使主轴运动,停转.
在程序中根据机床的实际运动顺序书写这些指令.
程序:把按顺序排列的各指令称为程序段.
为了进行连续的加工,需要很多程序段,这些程序段的集合称为程序.
为识别各程序段所加的编号称为顺序号,而为识别各个程序所加的编号称为程序号.
程序段和程序的构成如下所示.
1.
7.
1程序段一个程序段NGX.
Y.
MSTCRN:顺序号G:准备功能X,Y:运动尺寸M:辅助功能S:主轴功能T:刀具功能CR:程序段结束一个程序段开头是表示CNC运动顺序的顺序号,末尾是表示这个程序段结束的CR代码.
冷却液开/关工件刀具主轴旋转程序段程序段程序段程序段程序段程序刀具运动顺序Ⅱ编程篇-1(概要)1-71.
7.
2程序通常在程序的开头是程序号,在程序的最后是M30,表示程序结束.
1.
7.
3主程序和子程序在程序中,如果在工件的不同地方加工同样的图形时,往往先把这部分图形的程序单编出来,把它称作子程序.
相对于子程序来说,程序的本体就称为主程序.
在执行主程序时,如果有调用子程序的指令,则子程序被执行.
子程序执行完了后,再执行主程序的指令.
1.
8刀具形状和刀具加工刀具补偿功能(Ⅱ.
14)1.
8.
1用刀具底刃加工刀具长度补偿通常加工一个工件时,要使用几把刀具.
各刀具的长度是不同的,因此程序就要改变,CR;O0000;M30CR程序号码程序段程序段程序段程序结束子程序#1加工孔#1的程序加工孔#2的程序主程序M98P1001M98P1002M98P1001O1001;M99子程序#2O1002;M99孔#1孔#1孔#2孔#2Ⅱ编程篇-1(概要)1-8非常麻烦.
为此,事先测定出各刀具的长度,然后把它们与标准刀具长度的差设定给CNC(参照Ⅲ.
10数据的显示、设定).
这样,即使换刀,程序也不需要改变就可以加工了.
这个功能称为刀具长度补偿功能.
1.
8.
2用刀具侧刃加工刀具半径补偿功能(参照Ⅱ.
14)因为刀具有半径,因此一般刀具轨迹相对于加工形状只偏移一个刀具半径的位置.
事先把刀具半径存在CNC中,刀具就能沿着偏移加工形状距离为刀具半径的轨迹运动.
这个功能称为刀具半径补偿功能.
1.
9刀具移动的范围行程校验用参数设定可以指定刀具不可进入的范围,这个功能称为行程校验.
工件H1H2H3H4电机工作台参考点工件加工形状刀具经刀具半径补偿后的刀具轨迹Ⅱ编程篇-2(控制轴)2-12.
控制轴2.
1控制轴数控制轴数K1000M:3轴(X,Y,Z)K1000M4:4轴(X,Y,Z,4TH)同时控制轴数K1000M:3轴K1000M4:4轴2.
2设定单位最小设定单位最小移动单位最大行程0.
001毫米0.
001毫米99999.
999毫米0.
0001英寸0.
0001英寸9999.
9999英寸公制和英制不能混编在同一程序中.
设定单位请参照机床制造厂家的说明书.
2.
3最大行程最大行程=最小移动单位*99999999Ⅱ编程篇-3(准备功能)3-13.
准备功能准备功能由G代码及后接2位数表示,规定其所在的程序段的意义.
G代码有以下两种类型.
种类意义一次性代码只在被指令的程序段有效模态G代码在同组其它G代码指令前一直有效(例)G01和G00是同组的模态G代码G01X__;ZG01有效XG01有效G00Z__;G00有效G代码组别功能G00定位(快速移动)*G01直线插补(切削进给)G02圆弧插补CW(顺时针)G0301圆弧插补CCW(逆时针)G04暂停,准停G1000偏移值设定*G17XY平面选择G18ZX平面选择G1902YZ平面选择G20英制数据输入G2106公制数据输入G27返回参考点检查G28返回参考点G29从参考点返回G31测量功能G3900拐角偏移圆弧插补*G40刀具半径补偿注消G41左侧刀具半径补偿G4207右侧刀具半径补偿G43正方向刀具长度偏移G44负方向刀具长度偏移*G4908刀具长度偏移注消Ⅱ编程篇-3(准备功能)3-2G代码组别功能*G54工件坐标系1G55工件坐标系2G56工件坐标系3G57工件坐标系4G58工件坐标系5G5905工件坐标系6G6500宏程序命令G73钻深孔循环G74左旋攻丝循环G76精镗循环*G80固定循环注销G81钻孔循环(点钻循环)G82钻孔循环(镗阶梯孔循环)G83深孔钻循环G84攻丝循环G85镗孔循环G86钻孔循环G87反镗孔循环G88镗孔循环G8909镗孔循环G9301攻丝固定循环*G90绝对值编程G9103增量值编程G9200坐标系设定G98在固定循环中返回初始平面G9910返回到R点(在固定循环中)注:1.
带有*记号的G代码,当电源接通时,系统处于这个G代码的状态.
G20,G21为电源切断前的状态;G00,G01可以用参数设定来选择.
2.
00组的G代码是一次性G代码.
3.
如果使用了G代码一览表中未列出的G代码,则出现报警(№.
010),或指令了不具有的选择功能的G代码,也报警.
4.
在同一个程序段中可以指令几个不同组的G代码,如果在同一个程序段中指令了两个以上的同组G代码时,后一个G代码有效.
5.
在固定循环中,如果指令了01组的G代码,固定循环则自动被取消,变成G80状态.
但是01组的G代码不受固定循环的G代码影响.
6.
G代码分别用各组号表示.
Ⅱ编程篇-4(插补功能)4-14.
插补功能4.
1定位(G00)用G00定位,刀具以快速移动速度移动到由IP指定的位置.
指令形式:G00IP__;符号说明:IP__:如X_Y_Z_4TH_…一样,表示XYZ4中任意轴的组合.
(本说明书中在下面将使用这种表示法).
;(*):表示程序段结束(ISO代码为LF,EIA代码为CR).
刀具以各轴独立的快速移动速度定位.
通常刀具的轨迹不是直线.
注:1.
G00时各轴单独快速的快速进给速度由机床厂家设定(参数№.
038~040).
用F指定的进给速度无效.
2.
以上参数是3轴系统时的参数,当选择4轴系统时,参数号见附录7的注2,3.
本说明书以后章节如果没有特殊说明,也都是按3轴系统参数号说明的.
4.
2直线插补(G01)G01IP__F__;利用这条指令可以进行直线插补.
由IP指定的移动量,根据G90或G91指令分别为绝对值或增量值,由F指定进给速度,F在没有新的指令以前,总是有效的,因此不需一一指定.
(程序实例)G91G01X200.
0Y100.
0F200;用F指定的进给速度是刀具沿着直线运动的速度.
开机F初始默认值由参数№.
65决定.
注:各轴方向的速度如下:G01XαYβZγFf;在这个程序段中:X轴方向的速度:FxLf=*αY轴方向的速度:FLfY=*βZ轴方向的速度:FzLf=*γL=αβγ222++始点终点非直线插补式定位X轴Y轴100.
0200.
0o始点终点Ⅱ编程篇-4(插补功能)4-24.
3圆弧插补(G02,G03)用下面指令,刀具可以沿着圆弧运动.
XY平面的圆弧G02R_G03I_J_ZX平面的圆弧G02R_G03I_K_YZ平面的圆弧G02R_G03J_K_项目指定内容命令意义G17XY平面圆弧指定G18ZX平面圆弧指定1平面指定G19YZ平面圆弧指定G02顺时针转CW2回转方向G03反时针转CCWG90方式X、Y、Z中的两轴零件坐标系中的终点位置3终点位置G91方式X、Y、Z中的两轴从始点到终点的距离从始点到圆心的距离I、J、K中的两轴始点到圆心的距离4圆弧半径R圆弧半径5进给速度F沿圆弧的速度所谓顺时针和反时针是指在右手直角坐标系中,对于XY平面(ZX平面,YZ平面)从Z轴(Y轴,X轴)的正方向往负方向看而言,如下图例.
用地址X,Y或者Z指定圆弧的终点.
对应于G90指令的是用绝对值表示,对应于G91的是用增量值表示,增量值是从圆弧的始点到终点的距离值.
圆弧中心用地址I,J,K指定.
它们分别对应于X,Y,Z.
但I,J,K后面的数值是从圆弧始点到圆心的矢量分量,是含符号的增量值.
如下图:F_;X_Y_G17X_Z_G18F_;Y_Z_G19F_;G02G03XYG02G03ZXG02G03YZ顺时针及逆时针G17G18G19终点(Z,X)终点(X,Y)终点(Y,Z)Ⅱ编程篇-4(插补功能)4-3I,J,K根据方向带有符号.
圆弧中心除用I,J,K指定外,还可以用半径R来指定.
如下:G02X_Y_R_;G03X_Y_R_;此时可画出下面两个圆弧,大于180°的圆和小于180°的圆.
对于大于180°的圆弧则半径用负值指定.
(例)①的圆弧小于180°时G91G02X60.
0Y20.
0R50.
0F300;②的圆弧大于180°时G91G02X60.
0Y20.
0R-50.
0F300;(程序的实例)把图上的轨迹分别用绝对值方式和增量值方式编程:始点终点R=50R=5012140120902004060100XYR60R50Ⅱ编程篇-4(插补功能)4-4(1)绝对值方式G92X200.
0Y40.
0Z0;G90G03X140.
0Y100.
0I-60.
0F300;G02X120.
0Y60.
0I-50.
0;或G92X200.
0Y40.
0Z0;G90G03X140.
0Y100.
0R60.
0F300;G02X120.
0Y60.
0R50.
0;(2)增量方式G91G03X-60.
0Y60.
0I-60.
0F300;G02X-20.
0Y-40.
0I-50.
0;或G91G03X-60.
0Y60.
0R60.
0F300;G02X-20.
0Y-40.
0R50.
0;圆弧插补的进给速度用F指定,为刀具沿着圆弧切线方向的速度.
注:1.
I0,J0,K0可以省略.
2.
X,Y,Z同时省略表示终点和始点是同一位置,用I,J,K指令圆心时,为360°的圆弧.
G02I_;(全圆)使用R时,表示0°的圆:G02R_;(不移动)3.
刀具实际移动速度相对于指令速度的误差在±2%以内,而指令速度是刀具沿着半径补偿后的圆弧运动的速度.
4.
I,J,K和R同时指令时,R有效,I,J,K无效.
5.
如果在规定的平面上指令了不存在的轴,则会产生报警.
4.
4螺旋线机能用下面的指令可实现螺旋线功能:G17G02/G03X_Y_R_Z_F_;其中:G17:指定圆弧平面,其它可用G18/G19.
G02/G03:回转方向.
X_Y_:终点位置.
R_:圆弧半径.
Z_:第三轴终点位置.
F_进给速度.
Ⅱ编程篇-5(进给功能)5-15.
进给功能5.
1快速进给用指令(G00)进行快速定位.
各轴的快速进给速度由参数(№.
038~040)来设定,所以在程序中不需要指定.
对于快速进给速度,用操作面板上的开关可具备如下的倍率:F0,25,50,100%F0:是由参数设定的速度(№.
051),各轴通用.
5.
2切削进给在直线插补(G01),圆弧插补(G02,G03)中用F代码后面的数值来指令刀具的进给速度.
F的单位为毫米/分或英寸/分.
5.
2.
1切线速度控制切削进给通常是控制切线方向的速度使之达到指令的速度值.
F:切线方向的速度FFFX2Z2=+FX:X轴方向的速度FZ:Z轴方向的速度5.
2.
2切削进给速度的限制用参数(№.
045)可以设定切削进给速度的上限值.
实际的切削速度(使用倍率后的进给速度)如果超过了上限值,则被限制在上限值上.
上限值可以用毫米/分或英寸/分来设定.
相对于进给速度的指令值,CNC的运算误差为±2%.
但是在加减速中是不适用的.
通常在速度达到稳态后,通过测定移动500毫米以上距离的时间来求误差.
5.
2.
3进给速度倍率倍率通过拨操作面板上的倍率开关,可以使用0~150%(每挡10%)的倍率.
5.
3自动加减速在移动开始和移动结束时自动地进行加减速,所以能够平稳地启动和停止.
并且在移动速度变化时也自动地加减速,所以速度的改变可以平稳地进行.
因此在编程时对于加减速不需要考虑.
快速进给:直线型加减速(用参数设定各轴加减速时间常数)(№.
041~043)ZXZXFXFZF始点终点FFXFZ终点始点直线插补圆弧插补Ⅱ编程篇-5(进给功能)5-2切削进给:指数型加减速(用参数设定各轴通用的时间常数)(№.
047)手动进给:指数型加减速(用参数设定各轴通用的时间常数)(№.
047)5.
4程序段拐角处的速度控制由于采用插补后自动加减速的方法,因而自动加减速对于切削进给在拐角处会产生弧度.
此时如想取消此弧可在拐角处加入准停指令(G04).
例如,某一程序段只有X轴移动,下一程序段只有Z轴移动,在X轴减速时,Z轴进行加速,此时刀具的轨迹如下:CNC指令脉冲分配(插补)加减速控制加减速控制驱动控制驱动控制插补后的速度加减速控制后的速度步进电机插补后的速度加减速控制后的速度时间速度TR:快速进给加减速时间常数(参数041,042,043)时间快速进给TRTRTC时间TC切削进给,手动进给TC:切削及手动进给加减速时间常数(参数047)Ⅱ编程篇-5(进给功能)5-3如果加入准停指令,则刀具如上图实线那样按程序指令运动.
否则,切削进给速度越大,或加减速时间常数越长,则拐角处的弧度也越大.
圆弧指令时,实际刀具轨迹的圆弧半径比程序给出的圆弧半径小.
要拐角处误差变小,在机械系统允许的情况下,应使加减速时间常数尽量减小.
注:在程序段与程序段之间,CNC进行如下处理:前程序段下程序段点定位切削进给不移动点定位***切削进给**不移动****:待前程序段指令速度减速到零后,才执行下个程序段.
:在上个程序段插补完毕后,立刻开始执行下个程序段.
5.
5暂停(G04)利用暂停指令,可以推迟下个程序段的执行,推迟时间为指令的时间,其格式如下:G04P__;或者G04X__;以秒为单位指令暂停时间.
指令范围从0.
001~99999.
999秒.
如果省略了P,X指令则可看作是准确停.
ZX程序路径实际刀具路在此插入一个准停指Ⅱ编程篇-6(参考点)6-16参考点所谓参考点是指机械上某一特定的位置.
6.
1自动返回参考点(G28,G29)6.
1.
1自动返回到参考点(G28)G28IP__;利用上面指令,可以使指令的轴自动返回到参考点.
IP_;指定返回到参考点中途经过的中间点,用绝对值指令或增量值指令.
在执行这个程序段时,存储指令轴的中间点的坐标值.
G28程序段的动作如下:(1)快速从当前位置定位到指令轴的中间点位置(A点→B点).
(2)快速从中间点定位到参考点(B点→R点).
(3)若非机床锁住状态,返回参考点完毕时,回零灯亮.
这个指令一般在自动换刀时使用.
所以使用这个指令时,原则上要取消刀具半径补偿和刀具长度补偿.
图6.
1.
1返回参考点的动作注:1.
在电源接通后,如果一次也没进行手动返回参考点,指令G28时,从中间点到参考点的运动和手动返回参考点时相同.
此时从中间点运动的方向为以参数(№.
006ZMXZMYZMZ)设定的返回参考点的方向.
2.
关于中间点的坐标值,在G28程序段,只存储当前指令的轴的中间点的坐标值.
而在程序段没被指令的轴的中间点坐标值使用在此以前被指令的G28中间点的坐标值.
工件参考点ABCR(参考点)12345Ⅱ编程篇-6(参考点)6-2(例)N1X10.
0Z20.
0;N2G28X40.
0中间点(40.
0)N3G28Z60.
0中间点(40.
0,60.
0)6.
1.
2从参考点自动返回(G29)G29IP__;根据上述指令,使指令的轴经过中间点在IP指定的位置定位.
G29一般在G28后指令.
增量指令时,其值为离中间点的增量值.
G29程序段的动作可参照图6.
1.
1.
(1)指令的轴向在G28中定义的中间点进行定位(R点→B点).
(2)从中间点到指令的点进行定位(B点→C点).
用快速进给移动到中间点和指令点.
6.
1.
3G28,G29使用实例G28X1300.
0Y700.
0;(A→B的程序)……;G29X1800.
0Y300.
0;(B→C的程序)上例明确表示,在程序中,从中间点到参考点的具体移动量不需计算.
注:用G28指令通过中间点到参考点后,变更零件坐标系时,中间点也移动到新坐标系,此后指令G29时,在新坐标系中,通过中间点在指令的位置定位.
ABRC中间点(参考点)在R点换刀X(MM)Y13001800300500700300Ⅱ编程篇-7(坐标系)7-17坐标系数控机床工作时,刀具应达到的位置要告诉CNC,然后CNC控制刀具移动到这个位置.
而这个应该到达的位置可用某坐标系的坐标值给出.
如果编程的轴是X,Y,Z三个轴的话,则坐标值如下:当X40.
0Y30.
0Z20.
0;指令时的刀具位置.
7.
1零件坐标系的设定(G92)加工零件使用的坐标系称为零件坐标系.
零件坐标系可用下述方法设定.
利用程序指令G92和其后面的数值来确立零件坐标系.
7.
1.
1零件坐标系的设定G92IP__;利用上述指令就设定了零件坐标系,在这个坐标系中刀具现在位置的某点,例如刀尖的坐标值为IP.
一旦确定了坐标以后,绝对值指令的位置就是这个坐标系中的坐标值.
XYZ30.
040.
020.
0刀具XZ25.
323.
0G92X25.
3Z23.
0;如图所示,以刀尖作为程序的起刀点,在程序开始指令G92Ⅱ编程篇-7(坐标系)7-2如图所示,把刀柄上某一基准点作为起点,在程序开头指令G92,如果按程序中的绝对值指令运动,则基准点移到被指令的位置,必须加刀具长度补偿,其值为基准点到刀尖的差.
利用G92X600.
0Z1200.
0;指令进行坐标系设定(以刀柄上某基准点为起刀点时).
注:1.
如果在刀偏中用G92设定坐标系,则对刀具长度补偿来说是没加刀偏前用G92设定的坐标系.
2.
对于刀具半径补偿,用G92指令时要取消刀偏.
7.
1.
2自动设定坐标系如果选择了坐标系自动设定(参数№.
012的APRS),则手动返回参考点后,坐标系便自动设定.
如α、β、γ分别为参数№.
076~078的值,则返回参考点时,刀柄上某一基准点或者基本刀具的刀尖位置的坐标值为X=α,Y=β,Z=γ,这样就设定了零件的坐标系.
当然,自动设定的坐标系与在参考点执行下面指令设定是等效的:G92XαYβZγ;7.
2平面选择(G17,G18,G19)用G代码选择圆弧插补的平面和刀具半径补偿的平面.
G17……XY平面G18……ZX平面G19……YZ平面G17,G18,G19在没指令的程序段里,平面不发生变化.
(例)G18X_Z_;ZX平面X_Y_平面不变(ZX平面)另外,移动指令与平面选择无关.
例如,在下面这条指令情况下,Z轴不存在XY平面上,Z轴移动与XY平面无关.
G17Z_;XZ6001200基准点Ⅱ编程篇-8(坐标值和尺寸)8-18.
坐标值和尺寸8.
1绝对值指令和增量值指令(G90,G91)作为指令轴移动量的方法,有绝对值指令和增量值指令两种方法.
绝对值指令是用轴移动的终点位置的坐标值进行编程的方法.
增量值指令是用轴移动量直接编程的方法.
绝对值指令和增量值指令分别用G90和G91指令.
G90:绝对值指令G91:增量值指令上图的移动用绝对值指令编程和增量值指令编程的情况下:G90X40.
0Y70.
0;或G91X-60.
0Y40.
0;8.
2英制与公制的转换(G20,G21)输入单位是英制还是公制,用G代码来选择.
单位制G代码最小设定单位英制G200.
0001英寸公制G210.
001毫米英制、公制切换G代码要在程序的前头,坐标系设定之前,用单独的程序段指令.
下列各值的单位制根据英制、公制切换的G代码变化.
(1)F表示的进给速度指令值.
(2)与位置有关的指令值.
(3)偏移量.
(4)手摇脉冲发生器1个刻度的值.
(5)步进的移动量.
(6)参数的一部分数值.
注:1.
电源接通时英、公制切换的G代码与电源切断前相同.
2.
在程序中途,请不要变更G20,G21.
3.
机械单位制和输入单位制不同时,出现最大的误差是最小移动单位的0.
5,这个误差不累积.
4.
英制输入(G20)和公制输入(G21)切换时,要使偏移量符合输入单位的重新设定.
40.
0100.
030.
070.
0XY始点终点Ⅱ编程篇-8(坐标值和尺寸)8-28.
3小数点编程数值可以带小数点输入.
对于表示距离、时间和速度单位的指令值可以使用小数点,但要受地址限制,小数点的位置是毫米、英寸或秒的位置.
Z15.
0Z15毫米或者是Z15英寸F10.
010毫米/分或10英寸/分可以用小数点输入的地址如下:X,Y,Z,I,J,K,Q,R,F.
注:1.
指定暂停时,地址X可以输入小数点,但地址P不能用小数点(因为P也用于指定顺序号).
2.
用G代码变化小数点位置时,在一个程序段内要先指定G代码.
(1)G20(英制)X1.
0G04*……X1.
0作为X10000G04处理,结果暂停10秒钟.
G04X1.
0*……认为是G04X1000,暂停1秒钟.
3.
小数点有无大不相同,请注意.
G21;(指定)X1.
……X1毫米X1……X0.
001毫米G20;(英制)X1.
……X1英寸X1……X0.
0001英寸4.
有小数点的数值和无小数点的数值可以混用.
X1000Z23.
7;X10.
Z22359;5.
如果指定的数值小于最小设定单位时,则最小设定单位以后的数字被舍去.
例如指定X1.
23456时,对于公制输入,认为是X1.
234,对于英制输入,看作X1.
2345,并且数字位数不能超过最大位数.
6.
输入带小数点的数值时,根据最小设定单位将它改写成整数.
(例)X12.
34→X12340(公制输入)并对此整数的位数要进行校验.
(例)X123456.
7→X123456700(公制输入)此时超过7位数,报警.
7.
参数P013PODI,设置是否默认小数点.
PODI:编程时,可小数点编程的地址在编程时没有编入小数点时,默认为有小数点.
例:X100自动认为是X100.
即100毫米.
应当注意的是,此时,100μ应编为X0.
1而不能编为X100.
8.
参数P014POD设置可带小数点的地址是否必需编入小数点.
目的是防止绝对编程时未编入小数点.
POD0:小数点任意编入.
1:可以带小数点的地址必须编入小数点.
否则会产生报警.
报警007:小数点输入错或无小数点输入.
特例:1.
虽然F100.
=F100但在POD=1时,也必须编入小数点(F100.
)2.
由于Q可以带小数点,当给宏DO置1时,Q也必须编入1.
或0.
01.
如给宏变量#1132置低八位全为1:G65H01P#1132Q0.
255.
Ⅱ编程篇-9(主轴功能)9-19.
主轴功能(S功能)通过地址S和其后面的数值,把代码信号译码后送给机床,用于机床的主轴控制.
在一个程序段中可以指令一个S代码.
关于可以指令S代码的位数以及如何使用S代码等,请参照机床制造厂家的说明书.
当移动指令和S代码在同一程序段时,移动指令和S功能指令同时开始执行.
9.
1S两位数用地址S和其后面两位数控制主轴转速.
系统可提供8级主轴机械换挡.
(当没有选择模拟主轴机能时),S代码与主轴的转速的对应关系及机床提供几级主轴变速,请参照机床制造厂家的说明书.
S01~S08S代码的执行时间可由诊断号№209设定.
设定值:0~255(128毫秒~32.
640毫秒).
设定时间=设定值*128毫秒.
(如果设置0时同设置1).
注:1.
当在程序中指定了上述以外的S代码时,系统将产生以下报警并停止执行:02:S代码错.
2.
S两位数有效时,若指令S4、5位数,则后两位数有效.
3.
S代码设定时间参数参见11.
2.
9.
2S4、5位数(主轴模拟输出)9.
2.
1自动方式用地址S和其后面的4位(或5位)数值,直接指令主轴的转数(转/分),根据不同的机床厂家转数的单位也往往不同.
9.
2.
2手动方式当系统具备模拟主轴机能时,通过设定诊断参数201的JOGS可选择在手动方式下模拟主轴速度的控制.
1.
JOGS=1时,模拟主轴速度由编程的S代码控制.
2.
JOGS=0时,在手动方式下,模拟主轴速度由以下参数决定.
P61/71(4轴):开机时手动方式下的模拟主轴转速的初始值.
单位:转/分.
P62/72(4轴):手动方式下的模拟主轴转速每次的增或减值.
增加时以P56/66为上限.
在手动方式下,启动主轴后,主轴以参数设置的速度旋转.
此时,主轴倍率无效.
按主轴倍率增或减键时,主轴速度每次递增或递减参数P62/72设置的增量值.
在位置页面的S在手动方式下显示手动主轴转速.
在其它方式时,主轴以指定的S码旋转.
注:1.
参数指定的转速是主轴的转速,而不是主轴电机的转速.
其模拟电压的控制取决于主轴的挡位,在S代码开始执行设定时间开始执行下个程序段Ⅱ编程篇-9(主轴功能)9-2系统内部控制.
2.
在主轴旋转时,如果方式在手动及非手动间切换,主轴速度会发生变化.
4.
此节的手动方式是指手动连续进给,手轮/单步或回零方式(机械或程序回零).
9.
3模拟主轴自动换档(高/低档)模拟主轴可自动换高低两档.
主轴高齿档的最高转速设置在参数056,主轴高齿档的最低转速设置在参数057,主轴低齿档的最高转速设置在参数058.
在系统开机的初始状态,系统默认为低档(但低齿档输出接口无输出).
当指定的模拟主轴速度超过低齿档的最高速度时,开始自动换档.
换档过程:(1)轴运动停止,模拟主轴输出为参数021设定的转速.
(2)延迟诊断参数160设定的时间后,输出换档信号HIG(或LOW).
(3)检测档位信号HIGI(或LOWI)是否到位.
(4)到位后,延迟诊断参数161设定的时间.
(5)主轴以编程的转速旋转.
(6)延迟诊断参数162设定的时间后,取消轴停止,换档结束.
当模拟主轴在高速档旋转,而新指定的模拟主轴速度低于主轴高齿档的最低转速,则会自动进行由高齿档到低齿档的转换.
换档过程与上述过程一致.
注:当参数设定P056≤P058时,系统无自动换档机能,按P056设定的转速输出.
Ⅱ编程篇-10(刀具功能)10-110.
刀具功能10.
1松拉刀控制机能(1)参数设置:DGN201的SOLA选择是否有松拉刀控制机能.
诊断201SOLASOLA1:有松拉刀控制机能.
0:无松拉刀控制机能.
(2)输入信号参数000X13D201SOLA=1SOLAISOLAI:松拉刀开关信号.
003X36D201SOLA=1SLINISLINI:紧刀到位信号.
(3)输出信号050S3D201SOLA=1SOLAOSOLAO:松刀输出信号.
(3)松拉刀控制机能说明主轴旋转时:紧刀到位信号必须为(SLINI)1.
刀具处于紧刀状态(SOLAO=0).
否则,主轴停止,系统处于暂停状态.
或条件不满足,无法启动主轴.
同时产生报警:014:Song-latoolerror.
在主轴停止的状态下,按下松刀开关,松刀输出为1,关闭松刀开关,松刀输出为0.
Ⅱ编程篇-11(辅助功能)11-111.
辅助功能移动指令和M同在一个程序段中时,移动指令和M指令同时开始执行.
(例)N1G91G01X50.
0Y-50.
0M05;(主轴停止)11.
1辅助功能(M功能)如果在地址M后面指令了2位数值,那麽就把对应的信号送给机床,用来控制机床的ON/OFF.
M代码在一个程序段中只允许一个有效.
M代码:M03:主轴正转.
M04:主轴反转.
M05:主轴停止.
M08:冷却液开.
M09:冷却液关.
M10:卡紧.
M11:松开.
M32:润滑开.
M33:润滑关.
M00:程序暂停,按'循环起动'程序继续执行.
M01:程序选停,"机床面板"第三页的"程序选停"为开时有效.
M30:程序结束,程序返回开始.
M98:调用子程序.
M99:子程序返回.
除M00,M01,M30外,其它M代码的执行时间可由诊断号№208设定.
设定值:0~255(128毫秒~32.
640毫秒)设定时间=设定值*128毫秒.
(如果设置0时同设置1)主轴正反转,主轴停止,主轴制动时序图及设定时间:XY5050移动指令及主轴停止指令同时开始执行设定时间M代码开始执行开始执行下程序段Ⅱ编程篇-11(辅助功能)11-2T1:主轴在转动时,当发出主轴停止(自动或手动)命令后,先使能轴互锁信号,延迟T1后,发出主轴停止信号.
设定在诊断号№214.
T2:从发出主轴停止信号到发出主轴制动信号的延迟时间.
设定在诊断号№215/216.
T3:主轴制动时间,设定在诊断号№217/218.
注:1.
当在程序中指定了上述以外的M代码时,系统将产生以下报警并停止执行.
01:M代码错2.
M起动后,即使方式改变,也仍然保持,用手动方式的键也无法关闭,可按'复位'键关闭.
下面的M代码规定了特殊的使用意义.
1.
M30(程序结束)(1)表示主程序结束.
(2)停止自动运转,处于复位状态.
(3)返回到主程序开头.
(4)加工件数加1.
2.
M00:程序停当执行了M00的程序段后,停止自动运转.
与单程序段停同样,把其前面的模态信息全部保存起来.
CNC开始运转后,再开始自动运转.
3.
M98(调用子程序)用于调用子程序.
详细情况请参照子程序控制一节(Ⅱ12.
).
注:1.
M00,M01,M30的下一个程序段即使存在,也存不进缓冲存储器中去.
2.
执行M98和M99时,代码信号不送出.
主轴正/反转主轴制动主轴停止互锁信号停止命令T3T1T2Ⅱ编程篇-11(辅助功能)11-311.
2辅助机能参数诊断号№160~223为电池保持性PLC参数,用户可根据实际情况进行设定,设定码为二进制数,二进制数与十进制数的对照表参见附录.
设定:打开程序保护开关,在录入方式下,选择诊断画面,移动光标至要设定的序号前,键入二进制数据,按〖输入〗键后,键入的数据输入.
移动光标的方法:(1)用页及光标键(2)用检索的方法:P→要检索的诊断号→光标键↓.
№208:M代码处理时间.
设定单位:128毫秒设定码:0~255设定值:(№208+1)*128毫秒设定范围:128毫秒~32.
768秒№209:S代码处理时间.
设定单位:128毫秒设定码:0~255设定值:(№209+1)*128毫秒设定范围:128毫秒~32.
768秒№214:发出主轴停止命令后到发出主轴停止信号的延迟时间T1.
设定单位:16毫秒设定码:0~255设定值:№214*16毫秒设定范围:0~4.
096秒№215,216:从发出主轴停止信号到发出主轴制动信号的延迟时间.
设定单位:16毫秒设定码:0~65535设定值:(№216*256+№215)*16毫秒设定范围:0~1048.
560秒№217,218:主轴制动时间.
设定单位:16毫秒设定码:0~65535设定值:(№218*256+№217)*16毫秒设定范围:0~1048.
560秒№219:发出外部蜂鸣器输出信号的时间.
设定单位:32毫秒设定码:0~255设定值:№219*32毫秒设定范围:0~8.
192秒Ⅱ编程篇-11(辅助功能)11-411.
3与辅助机能有关的报警与辅助机能有关的报警通过外部信息画面显示,当产生报警时,系统自动切换到外部信息画面,在显示器的上部显示出报警的详细内容,在显示器的下端闪烁显示'报警'.
01:M代码错.
程序中编入了非法的M代码.
02:S代码错.
程序中编入了非法的S代码.
03:T代码错.
程序中编入了非法的T代码.
06:M03,M04码指定错.
主轴正转(反转)时,没有经过停止而又指定了主轴反转(正转).
07:主轴旋转时指定了S.
当主轴正在旋转时,指定了S代码进行主轴换挡.
09:请进行手动主轴换挡,完成后,按循环起动(参数P012BIT5SMANL=1).
10:请进行手动换刀,完成后,按循环起动(参数P012BIT6TMANL=1).
11:主轴单元报警.
12:请手动换主轴低档,完成后,按CAN及循环起动(选择模拟主轴时).
15:请手动换主轴高档,完成后,按CAN及循环起动(选择模拟主轴时).
Ⅱ编程篇-12(程序的构成)12-112.
程序的构成12.
1程序程序是由多个程序段构成的,而程序段又是由字构成的,各程序段用程序段结束代码(LF)分隔开.
12.
1.
1主程序和子程序(1)主程序程序分为主程序和子程序.
通常CNC是按主程序的指示运动的,如果主程序上遇有调用子程序的指令,则CNC按子程序运动,在子程序中遇到返回主程序的指令时,CNC便返回主程序继续执行.
在CNC存储器内,主程序和子程序合计可存储128个程序(标准机能),选择其中一个主程序后,便可按其指示控制CNC机床工作.
关于程序的存储方法,选择请参照操作篇9.
2章.
(2)子程序在程序中存在某一固定顺序且重复出现时,便可把它们作为子程序事先存到存储器中,这样可以使程序变得非常简单.
子程序可以在自动方式下调出,并且被调出的子程序还可以调用另外的子程序.
可以用一条调用子程序指令连续重复调用同一子程序,最多可重复调用999次.
主程序子程序指令1指令2调用子程序指令指令N.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
指令1指令1返回主程序.
.
.
.
.
.
.
.
.
O0001;.
.
.
.
.
.
.
.
.
M98P1000;.
.
.
.
.
.
.
.
.
.
.
.
M30;主程序O1000;.
.
.
.
.
.
.
.
.
M98P2000;.
.
.
.
.
.
.
.
.
.
.
.
M99;子程序O2000;.
.
.
.
.
.
.
.
.
M98P3000;.
.
.
.
.
.
.
.
.
.
.
.
M99;一重嵌套二重嵌套子程序Ⅱ编程篇-12(程序的构成)12-2(A)编写子程序按下面格式写一个子程序在子程序的开头,在地址O后写上子程序号,在子程序最后是M99指令.
M99如下例,也可以不作为单独的一个程序段.
(例)X……M99;关于子程序的存储方法请参照操作篇第9章.
注:为了与其他装置互换使用,在开头程序段的子程序可以不用O(:)而用N.
紧跟在N后面的顺序号就作为子程序号存入到存储器中.
(B)子程序的执行子程序由主程序或子程序调用指令调出执行.
调用子程序的指令格式如下:如果省略了重复次数,则认为重复次数为1次.
(例)M98P51002;表示号码为1002的子程序连续调用5次.
M98P_也可以与移动指令同时存在于一个程序段中.
(例)X1000M98P1200;此时,X移动完成后,调用1200号子程序.
(例)从主程序调用子程序执行的顺序O;子程序号.
.
.
.
.
.
.
.
.
M99;子程序子程序结束N0010N0020;N0030M98P21010;N0040.
.
.
.
.
.
;N0050M98P1010;N0060.
.
.
.
.
;O1010;N1020N1030N1040.
.
.
.
.
;N1050N1060.
.
.
.
.
.
M99;123主程序子程序M98P重复调用次数被调用的子程序号Ⅱ编程篇-12(程序的构成)12-3在子程序中调用子程序与在主程序中调用子程序的情况一样.
注:1.
当检索不到用地址P指定的子程序号时,产生报警(PS078).
2.
用MDI输入M98P;时,不能调用子程序.
(C)特殊使用方法也可用下列特殊使用方法.
(1)如果用P指定顺序号,当子程序结束时,不返回到调用此子程序的程序段的下一个程序段,而是返回到用P指定的顺序号的程序段,但是主程序在非存储器运转方式工作时,P不起作用.
这种方法返回到主程序与一般方法相比要用较多的时间.
(2)在主程序中,如果执行M99,则返回到主程序的开头继续重复执行.
例如,在主程序中有个程序段/M99,若跳过任选程序段开关是OFF状态,则执行M99,返回主程序的开头,并从开头重复执行.
在跳过任选程序段为OFF状态期间,一直反复执行,当跳过任选程序段开关为ON状态时,则跳过/M99程序段,而执行其下个程序段.
若此时是/M99Pn程序段时,则不返回到程序的开头,而返回到顺序号n的地方,但返回到n处时间较长.
12.
1.
2程序号在本控制装置中,CNC的存储器里可以存储多个程序,为了把这些程序相互区别开,在程序的开头,冠以用地址O及后续四位数值构成的程序号.
O程序号(1~9999,前导零可省略)地址O程序从程序号开始,用M30或M99为结束.
12.
1.
3顺序号和程序段程序是由多个指令构成的.
把它的一个指令单位称为程序段.
程序段之间是用程序段结束代码隔开.
在本说明书后面的说明中用字符";或*"表示程序段结束代码.
在程序段的开头可以用地址N和后续四位数构成的顺序号.
前导零可省略.
N0010N0020N0030.
.
.
.
.
;N0040M98P1010;N0050N0060.
.
.
.
.
;N0070.
.
.
.
.
;O1010;N1020N1030N1040.
.
.
.
.
;N1050N1060N1070M99P0070;主程序子程序主程序N0010N0020N0030.
.
.
.
.
;N0040N0050N0060.
.
.
.
.
;/N0070M99P0030;N0080.
.
.
;N0090M02;跳过任选程序段开关OFF跳过任选程序段开关ONⅡ编程篇-12(程序的构成)12-4顺序号的顺序是任意的,其间隔也可不等.
可以全部程序段都带有顺序号,也可以在重要的程序段带有.
但按一般的加工顺序,顺序号要从小到大.
在程序的重要地方带上顺序号是方便的(例如,换刀时,或者工作台分度移到新的加工面时等等).
注:因为程序号不允许是0,为了使顺序号与程序号通用,顺序号也不能用0.
12.
1.
4跳过任选程序段把"/"斜杠放在程序段的开头,当软操作面板上的跳过任选程序段开关置于ON时,在自动运行时,带有"/"的程序段信息无效.
当跳过任选程序段开关置于OFF时,则带有"/"的程序段信息有效.
也就是说含有"/"的程序段根据操作的选择,可以跳过.
跳过任选程序段开关ON时,其无效的范围如下:/N123G01X4……;N7890←无效范围→|(例)N100X100.
0;/N101Z100.
0;N102X200;在上面的程序中,如果跳过任选程序段开关是ON时,则N101程序段被跳过.
注:1.
"/"必须处于程序段的开头,如果不在开头,则从"/"开始到最近一个EOB之间的信息被跳过.
2.
跳过任选程序段是从存储器把信息读到缓冲存储器时处理的.
已读入到缓冲寄存器中的信息,即使开关置于ON,已读入的程序段也有效.
3.
在顺序号检索中,本功能也有效.
4.
在程序通过接口传入存储器中时,此功能无效.
即无论跳过任选程序段的开关状态为何,含有"/"的程序段都被存入.
5.
存储器内程序输出时,也与跳过任选程序段开关状态无关.
12.
1.
5字和地址字是构成程序段的要素.
字是由地址和其后面的数值构成的(有时在数值前带有+、-符号).
地址是英文字母(A~Z)中的一个字母.
它规定了其后数值的意义.
在本系统中,可以使用的地址和它的意义如下表所示:根据不同的准备功能,有时一个地址也有不同的意义.
地址数字X1000字Ⅱ编程篇-12(程序的构成)12-5功能地址意义程序号O程序号顺序号N顺序号准备功能G指定动作状态(直线,圆弧等)X,Y,Z坐标轴移动指令R圆弧半径尺寸字I,J,K圆弧中心坐标进给速度F进给速度指定主轴功能S主轴转速指定刀具功能T刀具号的指定辅助功能M控制机床方面ON/OFF的指定偏置号H偏置号的指定暂停P,X暂停时间的指定子程序号指定P指定子程序号重复次数P子程序的重复次数参数P,Q,R固定循环参数12.
1.
6基本地址和指令值范围基本地址和指令值范围如下表所示.
这些全部都是对CNC装置的限制值,而对机床方面的限制则完全是另外的,请特别注意这一点.
例如,对于CNC装置,可以指令X轴移动量约到100米(公制),而实际机床X轴行程可能是2米.
进给速度可能是3米/分.
编程时要参照本说明书,同时也要参照机床厂家发行的说明书,在很好理解对编程的限制的基础上编制程序.
功能地址毫米输入英寸输入程序号O1~99991~9999顺序号N1~99991~9999准备功能G0~990~99尺寸字X,Y,Z,I,J,K,Q,R±99999.
999毫米±9999.
9999英寸每分进给F1~15000毫米/分0.
01~600.
00英寸/分主轴功能S0~999990~99999刀具功能T0~990~99辅助功能M0~990~99暂停X,P0~99999.
999秒0~99999.
999秒子程序号指定,重复次数P1~99991~9999偏置号H0~320~32表12.
1.
6基本地址和指令范围12.
2程序结束Ⅱ编程篇-12(程序的构成)12-6程序的最后有下列代码时,表示程序部分结束.
ISO意义M30LF程序结束并返回程序开头M99LF子程序结束在执行程序中,如果检测出上述程序结束代码,则装置结束执行程序,变成复位状态.
若是M30LF时,要返回到程序的开头(自动方式).
若是子程序结束时,则返回到调用子程序的程序中.
12.
3文件结束在最后的程序结束的后面,有下列代码,表示文件的结束.
ISO意义%程序结束注:如果在程序部分最后没有M30就执行%时,CNC变成复位状态.
Ⅱ编程篇-13(简化编程功能)13-113.
简化编程功能13.
1固定循环(G73,G74,G76,G80~89)固定循环通常是用含有G功能的一个程序段完成用多个程序段指令完成的加工动作,使程序得以简化.
固定循环的一览表如下表所示.
表13.
1固定循环G代码开孔动作(-Z方向)孔底动作退刀动作(+Z方向)用途G73间歇进给快速进给高速深孔加工循环G74切削进给暂停主轴正转切削进给反攻丝循环G76切削进给主轴准停快速进给精镗G80取消G81切削进给快速进给钻,点钻G82切削进给暂停快速进给钻,镗阶梯孔G83间歇进给快速进给深孔加工循环G84切削进给暂停主轴反转切削进给攻丝G85切削进给切削进给镗G86切削进给主轴停快速进给镗G87切削进给主轴正转快速进给反镗G88切削进给暂停主轴停手动镗G89切削进给暂停切削进给镗一般固定循环是由下面六个动作顺序组成的.
动作1……X、Y定位.
动作2……快速进给到R点.
动作3……孔加工.
动作4……孔底的动作.
动作5……退回到R点.
动作6……快速进给到初始.
图13.
1(A)在XY平面定位,在Z轴方向进行孔加工.
不能在其它轴方向进行孔加工.
与指定平面的G代码无关.
规定一个固定循环动作由三种方式决定.
它们分别由G代码指定.
(1)数据形式动作1动作2R点动作3动作4动作5动作6起始点快速进给切削进给Ⅱ编程篇-13(简化编程功能)13-2G90绝对值方式;G91增量值方式(2)返回点平面G98初始点平面;G99R点平面(3)孔加工方式G73,G74,G76,G80~89注:初始点平面是表示从取消固定循环状态到开始固定循环状态的孔加工轴方向的绝对位置.
(A)G90,G91相对应的数据给出方式是不同的,如图13.
1(B)所示.
G90(绝对值指令)G91(增量值指令)图13.
1(B)固定循环的绝对值指令和增量值指令(B)在返回动作中,根据G98和G99的不同,可以使刀具返回到初始点平面或R点平面.
指令G98和G99的动作如图13.
1(C)所示.
通常,最初的孔加工用G99,最后加工用G98.
用G99状态加工孔时,初始平面也不变化.
G98(返回到初始点平面)G99(返回到R点平面)图13.
1(C)初始点平面和R点平面(C)G73/G74/G76/G81~G89指定了固定循环的全部数据(孔位置数据、孔加工数据、重复次数),使之构成一个程序段.
指定固定循环的数据如下所示:R点Z点RZZ=0绝对R点Z点相对RZ初始点平面R点初始点平面Ⅱ编程篇-13(简化编程功能)13-3指定内容地址说明孔加工方式G请参照表13.
1孔位置数据X,Y用绝对值或增量值指定孔的位置,控制与G00定位时相同.
Z如图13.
1(A)所示,用增量值指定从R点到孔底的距离或者用绝对值指令孔底的坐标值.
进给速度在动作3中是用F指定的速度,在动作5中根据孔加工方式不同,为快速进给或者用F代码指令的速度.
R用增量值指定图13.
1(B)的从初始点平面到R点距离,或者用绝对值指定R点的坐标值.
进给速度在动作2和动作6中全都是快速进给.
Q指定G73,G83中每次切入量或者G76,G87中平移量(增量值)P指定在孔底的暂停时间.
时间与指定数值关系与G04指定相同.
孔加工数据F指定切削进给速度.
一旦指令了孔加工方式,一直到指定取消固定循环的G代码之前一直保持有效,所以连续进行同样的孔加工时,不需要每个程序都指定.
取消固定循环的G代码,有G80及01组的G代码.
孔加工数据,一旦在固定循环中被指定,便一直保持到取消固定循环为止,因此在固定循环开始,把必要的孔加工数据全部指定出来,在其后的固定循环中只需指定变更的数据.
注:F指令的切削速度,即使取消了固定循环也保持.
在固定循环中,如果复位,则孔加工数据、孔位置数据均被消除.
上述的保持数据和清除数据的实例如下所示:顺序数据的指定说明①G00X-M3;②G81X-Y-Z-R-F-;因为是开始,对Z,R,F要指定需要的值.
③Y-因为和孔2中已指定的孔加工方式及孔加工数据相同,所以G81,Z-R-F-全可省略.
孔的位置移动Y,用G81方式加工孔进一次.
④G82X-P-相对于孔3位置只在X轴方向移动.
用G82方式加工,并用2中已指定的Z,R,F和4中指定的P为孔加工数据进行孔加工.
⑤G80X-Y-M5;不进行孔加工.
取消全部孔加工数据(F除外).
⑥G85X-Z-R-P-;因为在5中取消了全部数据,所以Z,R需要再次指定,F与2中指定的相同,故可省略.
P此程序段中不需要,只是保存起来.
GX__Y__Z__R__Q__P__F__;孔位置数据孔加工数据孔加工方式Ⅱ编程篇-13(简化编程功能)13-4⑦X-Z-只是与⑥的Z值不同的孔加工,并且孔位置在X轴方向有移动.
⑧G89X-Y-把7中已指定的Z,6中已指定的R,P和2中指定的F作为孔加工数据,进行G89方式的孔加工.
⑨G01X-Y-消除孔加工方式和孔加工数据(F除外).
各孔加工动作的详细情况如下:(1)G73(高速深孔加工循环)G73(G98)G73(G99)退刀量d用参数(№.
049/058)设定,Z轴方向间歇进给,为使深孔加工容易排屑,退刀量可设定为微小量,这样可以提高工效.
退刀是用快速进给的.
(2)G74(反攻丝循环)G74(G98)G74(G99)在孔底主轴正转,进行反攻丝.
注:用G74反攻丝动作中,进给速度倍率无效,即使用了进给保持,在返回动作结束前也不停止.
qqq初始点平面Z点dR点平面qqqR点平面Z点dZ点主轴正转R点主轴反转P初始点平面Z点主轴正转R点主轴反转PⅡ编程篇-13(简化编程功能)13-5(3)G76(精镗循环)G76(G98)G76(G99)在孔底,主轴停止在固定的回转位置上,向与刀尖相反的方向位移后退,不擦伤加工面进行高精度、高效率镗削加工.
注:用地址Q指定位移量,Q值必须是正值.
即使用负值,符号也不起作用.
位移的方向是+X,-X,+Y,-Y中哪一个,事先用参数(№.
005PMXY)设定.
Q值在固定循环中是模态的.
在G73,G83中,Q值也作为切入量使用,因此指定时请特别注意.
(4)G80取消固定循环它取消固定循环(G73,G74,G76,G81~G89),以后按通常动作加工.
Z点、R点取消了(也就是说在增量值指令中,R=0,Z=0)其他的孔加工数据也全部被取消了.
(5)G81(钻孔循环,点钻循环)G81(G98)G81(G99)平移量q刀具主轴准停初始点平面Z点R点Z点R点主轴准停R点Z点暂停平移(快速)主轴正转qP主轴准停R点初始点平面Z点暂停平移(快速)主轴正转qPⅡ编程篇-13(简化编程功能)13-6(6)G82(钻孔循环,镗阶梯孔循环)G82(G98)G82(G99)和G81相同,只是在孔底暂停后上升.
由于在孔底暂停,在盲孔加工中,可提高孔深的精度.
(7)G83(深孔加工循环)G83(G98)G83(G99)G83X-Y-Z-Q-R-F-;按上述格式指令,Q为每次的切入量,用增量值指令.
当第二次以后切入时,先快速进给到距刚加工完的位置d毫米(或英寸)处,然后变为切削进给.
Q值必须是正值,即使指令了负值,符号也无效.
d用参数(№.
050/059)设定.
qqq初始点平面Z点dR点平面qqqZ点dR点平面Z点R点暂停P初始点平面Z点R点暂停PⅡ编程篇-13(简化编程功能)13-7(8)G84(攻丝循环)G84(G98)G84(G99)在孔底,主轴反转,进行攻丝循环.
注:在G84攻丝动作中,进给速度倍率无效,即使用了进给保持,在返回动作结束前也不停止.
(9)G85(镗削循环)85(G98)G85(G99)G85与G84相同,只是在孔底主轴不反转.
初始点平面Z点R点Z点R点初始点平面Z点主轴正转R点主轴反转暂停暂停PPZ点主轴正转R点主轴反转暂停P暂停PⅡ编程篇-13(简化编程功能)13-8(10)G86(镗削循环)G86(G98)G86(G99)和G81相同,只是在孔底主轴停,然后用快速返回.
(11)G87(镗削循环,反镗循环)G87(G98)G87(G99)不用在X,Y轴方向定位后,主轴在预定的回转位置停止,然后向刀具的相反方向位移,用快速进给在孔底(R点)定位,然后在此位置进给一个位移量,主轴正转后沿Z轴的正方向加工到Z点.
在此位置,使主轴再次停止在预定的位置后,再向刀具方向位移,然后刀具从孔中退出.
返回到初始点后,进给一个位移量,主轴正转,进行下个程序段动作.
关于位移量及其方向,与G76时完全相同(方向设定G76,G87是通用的).
初始点平面Z点主轴正转R点主轴停止初始点平面Z点主轴正转R点主轴停止主轴正转主轴准停R点初始点平面Z点平移(快速)主轴正转q主轴准停Ⅱ编程篇-13(简化编程功能)13-9(12)G88(镗孔循环)G88(G98)G88(G99)在孔底暂停,主轴停止后变为停止状态.
所以此时转换成手动状态,可以手动移出刀具,无论进行什么样的手动操作,都要以刀具从孔中安全退出为好.
再开始自动加工时,快速返回R点或初始平面后,主轴停止,G88执行完毕.
(13)G89(镗孔循环)G89(G98)G89(G99)虽然与G85相同,但在孔底进行暂停.
(14)指令固定循环的注意事项1指令固定循环时,在其前面需要用辅助功能(M代码)先使主轴旋转起来.
M03;主轴正转:G……;正确:M05;主轴停:G……;不正确(在此程序段前需要指令M03或M04)2在固定循环状态时,如果指令了X,Y,Z,R数据中的任意一个,就进行孔加工,如果程序段中不含有它们中任何一个数据,则不进行孔加工.
但是当X在G04X-;被指令的情况下,也不进行孔加工.
初始点平面Z点主轴正转R点主轴停止暂停后手动进给P初始点平面Z点主轴正转R点主轴停止暂停后手动进给PZ点暂停R点初始点平面Z点暂停R点Ⅱ编程篇-13(简化编程功能)13-10G00X-;G81X__Y__Z__R__F__K__;;(不进行孔加工)F-;(不进行孔加工,F值更新了)M-;(不进行孔加工,只执行辅助功能)G04P-;(不进行孔加工,用G04P-*改变孔加工数据P)3在可进行孔加工动作的程序段中可指令孔加工数据Q,P.
也就是说在指令X,Y,Z,R任意一个数据的程序中,可指令Q,P.
在不可进行孔加工动作的程序段中,即使指令了这些数据,也只作为模态数据存储.
4当使用控制主轴回转的固定循环(G74,G84,G86)时,如果孔的定位(X,Y)或者从初始点平面到R点平面的距离较短,并要连续加工时,在进入孔加工动作(-Z)前,有时主轴不能达到指定的转速.
这时,把G04暂停程序段加入各孔加工动作之间,延长时间.
下面给出实例.
程序实例如下:G00M__;G86X__Y__Z__R__F__;G04P_暂停,不进行孔加工)X__Y__;G04P_暂停,不进行孔加工)X__Y__;G04P_暂停,不进行孔加工)根据不同的机床,有时此问题也可以不考虑,详细情况请参照机床厂家发行的说明书.
5如前所述,用G00~G03(01组代码)也可以取消固定循环.
当读取G00~G03代码时,才进行取消固定循环,因此当它与固定循环G代码在同一程序段时会出现下述两种情况(#表示0~3,表示固定循环代码)G#GX-Y-Z-R-Q-P-F-K-;(进行固定循环)GG#X-Y-Z-R-Q-P-F-K-;按着G#进行X,Y,Z轴移动,R,P,Q,K无效,F被存储下来.
6固定循环和辅助功能在同一程序段指令时,在最初定位时(图13.
1(A)的动作1)送出M和MF代码,并且等待结束信号(FIN)到来后,才进行下个孔加工.
7在固定循环方式中,刀具偏移指令无效.
8在固定循环方式中,如果指令了刀具长度偏移(G43,G44,G49),则在R点平面定位(动作2)时进行偏移.
9操作注意事项:插入暂停,等待主轴转速到达正常值Ⅱ编程篇-13(简化编程功能)13-11(A)单程序段用单程序段方式进行固定循环时操作时,分别在图13.
1(A)中动作1,2,6的终点停止,因此加工一个孔要启动三次.
在动作1,2的终点,进给保持指示灯亮后停止.
在停止状态停止.
(B)进给保持在G74,G84的动作3~5之间,进行进给保持,进给保持指示灯立刻亮.
但控制装置继续执行到动作6才停止.
在动作6期间,如果再次进行进给保持,则立刻停止.
(C)倍率在G74,G84的动作中,进给速度的倍率认为是100%.
(15)使用刀具长度补偿,固定循环的实例#1~6.
.
.
钻Φ10孔#7~10.
.
.
钻Φ20孔#11~13.
.
.
镗Φ95孔(深50MM)20305050XZ250起始点位置返回位置#1#2#3#4#5#6#7#8#9#10#11#12#13XY350100100100100150250250150200400参考点Ⅱ编程篇-13(简化编程功能)13-12偏置号11的值为200.
0,偏置号15的值为190.
0,偏置号31的值为150.
0作为偏移量分别设定.
程序如下:N001G92X0Y0Z0坐标系设定在参考点.
N002G90G00Z250.
0T11M;换刀.
N003G43Z0H11在初始点进行平面刀具长度补偿.
N004S30M3主轴启动.
N005G99G81X400.
0Y-350.
0;Z-153.
0R-97.
0F120.
0定位后加工#1孔.
N006Y-550.
0定位后加工#2孔,返回R点平面.
N007G98Y-750.
0定位后加工#3孔,返回初始点平面.
N008G99X1200.
0定位后加工#4孔,返回R点平面.
N009Y-550.
0定位后加工#5孔,返回R点平面.
N010G98Y-350.
0定位后加工#6孔,返回初始点平面.
N011G00X0Y0M5返回参考点,主轴停.
N012G49Z250.
0T15M6取消刀具长度补偿,换刀.
N013G43Z0H15初始点平面,刀长补偿.
N014S20M3主轴起动.
N015G99G82X550.
0Y-450.
0;Z-130.
0R-97.
0P30F70;定位后加工#7孔,返回R点平面.
N016G98Y-650.
0定位后加工#8孔,返回初始点平面.
N017G99X1050.
0定位后加工#9孔,返回R点平面.
N018G98Y-450.
0定位后加工#10孔,返回初始点平面.
N019G00X0Y0M5返回参考点,主轴停.
N020G49Z250.
0T31M6取消刀具长度补偿,换刀.
N021G43Z0H31初始点平面刀长补偿.
N022S10M3主轴起动.
N023G85G99X800.
0Y-350.
0;Z-153.
0R47.
0F50定位后加工#11孔,返回R点平面.
N024G91Y-200.
0定位后加工#12,#13孔,返回R点平面.
Y-200.
0;N025G00G90X0Y0M5返回参考点,主轴停.
N026G49Z0取消刀具长度补偿.
N027M30程序停.
T11T15200190150T31Ⅱ编程篇-14(补偿功能)14-114.
补偿功能14.
1刀具长度补偿(G43、G44、G49)14.
1.
1刀具长度补偿AG43G43G44或者G44按上述指令,把Z轴指令终点位置再移动一个偏移量.
把编程时假想的刀具长度值和实际加工时使用刀具长度值之差预先设定在偏置存储器中,因此不需要变更程序,只需要改变刀具长度补偿值就可以使用不同长度的刀具加工零件.
G43,G44指定不同的偏移方向,用H代码指定偏移号.
(1)偏移方向G43:正向偏移G44:负向偏移无论是绝对值指令,还是增量值指令,在G43时,把程序中Z轴移动指令终点坐标值加上用H代码指定的偏移量(设定在偏置存储器中);G44时,减去H代码指定的偏移量,然后把其计算结果的坐标值作为终点坐标值.
Z轴移动省略时,可视为下述指令情况.
当偏置量是正值时,G43指令是在正方向移动一个偏置量,G44是在负方向上移动一个偏置量.
G43G44偏置量是负值时,反方向移动.
G43,G44是模态G代码,在遇到同组其他G代码之前均有效.
(2)偏置量的指定由H代码指定偏置号,与该偏置号对应的偏置量与程序中Z轴移动指令值相加或相减,形成新的Z轴移动指令.
偏置号可以指定H00~H32,但这个号码是与刀具半径补偿共用的.
用LCD/MDI面板,可把偏置号对应的偏置量事先设定在偏置存储器中.
偏置量设定的范围如下:毫米输入英寸输入偏移量0~±999.
9990~±99.
9999偏置号00,即H00对应的偏置量是0.
H00对应的偏置量不能设定.
(3)取消刀具长度补偿用G49或者H00取消刀具补偿.
指令G49或H00后,马上取消补偿.
(4)刀具长度补偿的具体实例(A)刀具长度补偿(加工#1,#2,#3孔)Z_;Z_H_;G91H_;Ⅱ编程篇-14(补偿功能)14-2H01=偏移量-4.
0N1G91G00X120.
0Y80.
0N2G43Z-32.
0H01N3G01Z-21.
0N4G04P2000N5G00Z21.
0N6X30.
0Y-50.
0N7G01Z-41.
0N8G00Z41.
0N9X50.
0Y30.
0N10G01Z-25.
0N11G04P2000N12G00Z57.
0H00N13X-200.
0Y-60.
0N14M30;注:变更偏置号而改变偏置量时,只是变成新的偏置量,而不是新的偏置量与旧的补偿量相加.
H01偏置量20.
0H02偏置量30.
0G90G43Z100.
0H01Z走到120.
0G90G43Z100.
0H02Z走到130.
014.
1.
2刀具长度补偿BG17Z_G18Y_H_;G19X_或者G17G18H_;G19G43G44G43G44编程位置实际位置补偿量(E=4MM)20MM30MM30MM35MM30MM1832281203050XYZ①⑥⑨13#1#2#3②③⑤④⑦⑧12⑩11Ⅱ编程篇-14(补偿功能)14-3按上述指令,Z轴或X、Y轴移动指令为在原终点位置,向正或负向再偏移一个在偏置存储器中设定的值.
根据G17、G18、G19指定偏置轴,G43、G44指定偏置方向,H代码指定与偏置量对应的偏置号.
(1)偏置轴把与指定平面(G17、G18、G19)相垂直的轴作为偏置轴平面指定偏置轴G17Z轴G18Y轴G19X轴两个轴以上的刀具位置偏置,可用指定偏移轴以及2~3个程序段更换偏置轴.
(例)补偿X,Y轴时G19G43H_偏移X轴G18G43H_偏移Y轴,与上个程序段合起来,X,Y轴均被补偿.
(2)偏移方向G43:正向偏移G44:负向偏移;同刀具补偿A,唯一不同的是补偿轴可为Z,Y,X.
(3)偏移量的指定:同刀具长度补偿A(4)取消刀具长度补偿取消刀具长度补偿时用G49或H00.
取消两轴以上的补偿时,如果用G49,则所有轴补偿都被取消.
用H00只是取消与指定平面相垂直的轴的补偿量.
G49或H00被指令后,立刻进行取消操作.
注:1.
用参数(№.
006TLCP)选择刀具长度补偿A或B.
2.
在没有选择三轴联动机能时,如果三个轴全都补偿了,用G49指令取消时,会出现P/S015号报警,此时请与H00并用.
14.
2刀具半径补偿B(G39~G42)14.
2.
1刀具半径补偿机能刀具在半径上进行偏移的机能,可以使刀具在偏移的轨迹上运动.
该补偿指令,可以用自动运转或MDI运转的G机能来指定,偏移量(刀具半径值)与H代码号相对应,用手动数据输入事先存在存储器中.
其偏移值的个数最多可有32个.
用H代码指定与偏移量对应的偏移号.
H代码是模态的.
与偏移有关的G机能如下表所示.
G代码组机能G3900圆弧补偿的拐角偏移G4007取消刀具半径补偿G4107刀具半径补偿左G4207刀具半径补偿右如果指定G41,G42则系统的状态称为补偿状态方式.
如果指定G40,则称为取消补偿方式.
电源刚接通后,是取消状态.
这些刀具半径补偿状态不受非模态G机能(G39)的影响.
G41,G42是07组的G代码,可以与G00,G01,G02,G03混合使用,两者共同规定一种刀具运动方式.
程序的最后,必须以取消补偿状态结束.
Ⅱ编程篇-14(补偿功能)14-414.
2.
2补偿量(H代码)偏移量最多可以设定32个(与刀具长度偏置用的偏移量合在一起共32个).
偏移量事先从MDI&LCD单元设定,它与程序上被指定H代码后面2位数值相对应(参照操作篇Ⅲ.
10刀具偏移量的设定和显示一章).
可以设定的偏移量值的范围如下:毫米输入英寸输入偏移量0~±999.
9990~±99.
9999偏移号为00也就是说对应于H00的偏移量为0.
H00里不能设定偏移量.
14.
2.
3补偿矢量在下图中,形状为A的工件,要用半径为R的刀具切削时,刀具中心轨迹是与A相距R的图形B.
象这种刀具偏离工件一定距离的情况,称为偏移,也就是说,B是把图形A偏移了R之后的轨迹.
偏移矢量是大小等于指定的偏移量的二维矢量,存储在数控装置内部,随着刀具前进,它的方向时刻在改变.
偏移矢量(以下简称矢量),由数控装置内部计算出的,它用来计算偏离一个刀具半径的偏移轨迹.
此矢量是随着刀具前进的,清楚这一点,对编程是很重要的.
如下图所示,通常矢量的方向是垂直于刀具前进方向,并且从工件指向刀具中心.
偏移和矢量14.
2.
4平面选择和矢量偏移的计算是在由G17,G18,G19所指定的平面上进行的.
该平面称为偏置平面.
未指定时就认为是G17.
例如,在选择XY平面时,用程序中的(X,Y),可以计算偏移,形成矢量.
指定平面外的轴的坐标值不受偏移的影响,程序中的指令值仍然被使用.
下面各节以选择XY平面为例.
对偏移命令,如何形成矢量,如何进行偏移计算等问题进行说明,选择其它平面时,可以同样考虑.
另外,偏移矢量用复位可以取消.
14.
2.
5拐角偏移圆弧插补(G39)在G01,G02或G03程序段中间,用下面指令G39X__Y__I__J__H__;在拐角处,以刀具半径为半径,进行偏移圆弧插补.
并形成与(X,Y)垂直的新矢量.
如果从它的终点来看(X,Y).
指向左侧为G41,指向右侧为G42.
刀具沿着圆弧从旧矢量尖端移动到新矢量尖端.
(X,Y)可以用与G90对应的绝对值表示或与G91对应的增量值表示.
此指令只有在补偿状态且G41或与G42被指令时才可以使用.
圆弧是向右转还是往左转由G41或G42决定.
该指令是非模态的.
它不破坏01组的G机能.
BAR矢量Ⅱ编程篇-14(补偿功能)14-514.
2.
6取消刀具半径补偿(G40)在G00,G01状态,利用下面指令,G40X__Y__;.
从起点的旧矢量向着终点进行直线运动.
G00方式下,各轴向终点进行快速运动.
使用此指令,使系统从刀具补偿状态进入到取消刀具补偿状态.
如果只是G40;没指令X__Y__时,刀具沿旧矢量的反方向运动到起点.
14.
2.
7刀具半径补偿左(G41)(A)G00,G01时G41X__Y__I__J__H__;指令在程序段终点,形成一个与(I,J)的方向垂直的新矢量,刀具从起点处旧矢量的尖端向新矢量的尖端移动.
旧矢量为零时,利用该指令,使刀具从取消刀具偏置状态进入刀具半径补偿状态.
此时,由H代码指定偏移值.
但是,指定G00时,各轴以各自的快速进给速度运动.
(I,J)是从终点以增量表示的.
如果省略(I,J),则新矢量与(X,Y)垂直.
新矢量旧矢量刀具中心轨迹O(X,Y)或(I,J)G41的情况G42的情况新矢量旧矢量刀具中心轨迹O(X,Y)或(I,J)起点编程路径刀具中心路径(X,Y)旧矢量始点旧矢量新矢量(X,Y)(I,J)编程轨迹刀具中心轨迹Ⅱ编程篇-14(补偿功能)14-6(B)G02,G03时G41……;··G02/G03X__Y__R__;根据上述程序可以作出新矢量,它位于圆弧中心和终点的连线上,从圆弧前进方向看,指向左方(右方),刀具中心从圆弧的旧矢量尖端向着新矢量尖端沿着圆弧移动.
但前提是旧矢量已正确地作出来了.
偏移矢量是从起点或终点指向圆弧中心或者背离中心的.
14.
2.
8刀具半径补偿-右(G42)G42与G41刚好相反,沿着刀具前进方向,刀具在工件的右侧进行偏移.
也就是说用G42作出的矢量方向恰好和G41作出的矢量方向相反.
除了矢量方向相反之外,偏移方法与G41完全相同.
(A)G00,G01时G42X__Y__I__J__H__;但是,G00时,各轴以独立的快速进给速度运动.
G42X__Y__;(B)G02,G03时刀具中心轨迹始点旧矢量(X,Y)R编程轨迹刀具中心轨迹始点旧矢量(X,Y)R编程轨迹(I,J)(X,Y)起点旧矢量程序路径刀具中心路径新矢量(X,Y)起点旧矢量程序路径刀具中心路径新矢量Ⅱ编程篇-14(补偿功能)14-7例14.
2.
8(A)G91G17G41G01X15.
00Y25.
00F180H06;G39X35.
00Y15.
00;X35.
00Y15.
00;G39X25.
00Y-20.
00;X25.
00Y-20.
00;G39X5.
00Y-25.
00;G03X25.
00Y-20.
50R25.
00;(增量指令)例14.
2.
8(B)单位:毫米G91G17G01X50.
00Y50.
00F150H06;G02X96.
57Y-40.
00R56.
57;G01-Y40.
00;(增量指令)刀具中心轨迹始点旧矢量(X,Y)R编程轨迹刀具中心轨迹始点旧矢量(X,Y)R编程轨迹新矢量新矢量15.
025.
035.
015.
020.
025.
025.
05.
0刀具中心路径程序路径R56.
5750.
040.
040.
040.
050.
040.
0刀具中心轨迹编程轨迹Ⅱ编程篇-14(补偿功能)14-814.
2.
9有关偏移的一般注意事项(A)偏移号的指定偏移号是用H代码指定的.
可在从偏移取消状态变到刀具半径补偿状态之前的任何地方指定.
另外,一组指定后,除非中途需要变更偏移量,否则不需要重新指定.
(B)关于从取消偏移状态进入刀具半径补偿状态从取消偏移状态进入刀具半径补偿状态时的移动指令必须是定位(G00)或直线插补(G01),不能用圆弧插补(G02,G03).
(C)从刀具半径补偿状态进入取消偏移状态.
此时的移动指令必须是定位(G00)或直线插补(G01).
不能用圆弧插补(G02,G03).
(D)刀具半径补偿左和右的转换偏移方向从左变到右,或者从右变到左时,一般都是经过偏移取消状态.
但是定位(G00)或者直线插补(G01)可以不经由偏移取消状态,直接转换.
此时的刀具轨迹如下图所示:G41G42.
.
.
.
.
.
;G00G42X__Y__;G01G41X__Y__F__;(E)偏移量的变更偏移量的改变一般是在偏移取消状态,在换刀时进行,但对于定位(G00)和直线插补来说在偏移状态中也可进行,其情况如下图所示.
偏移量的变更(F)偏移量的正负和刀具中心轨迹如果把偏移量设为负值时,则加工出的工件相当于把程序单上G41与G42全部变换时的情况,因此,沿着工件外侧切削的变成沿着工件内侧切削,原来沿着工件内侧加工的,变成沿着外侧加工.
如图中一般编程时,偏移量设为正值.
程序轨迹如(A)那样时,如果把偏移量设为负的,就象(B)图那样运动.
如果开始象(B)那样编程时,当把偏移量设为负时,便象(A)图那样移动.
新矢量旧矢量程序路径刀具中心路径(一般不是直线)(X,Y)新矢量旧矢量程序路径刀具中心路径(X,Y)(I,J)旧矢量新矢量(X,Y)刀具中心路径编程路径旧矢量新矢量(X,Y)刀具中心路径编程路径Ⅱ编程篇-14(补偿功能)14-9(A)(B)一般带有尖角的图形是常见的(带有尖角圆弧插补的图形).
但是偏移量设为负值后,不能加工零件的内侧圆形.
切削某角内侧尖角时,在那儿插入适当半径的圆弧,圆滑过渡后,才能切削.
14.
2.
10偏移矢量的程序例子(1)G91G17G00G41Y20.
00H08;(H08是偏移号,事先用MDI把与H08对应的刀具半径值输入到偏置存储器中)(2)G01Z-25.
00F100;(3)Y40.
00F25.
00;(4)G39X40.
00Y20.
00;(5)X40.
00Y20.
00;(6)G39X40.
00;(7)G02X40.
00Y-40.
00R40.
00;(8)X-20.
00Y-20.
00R20.
00;(9)G01X-60.
00;(10)G00Z25.
00;(11)G40Y-20.
00M02;14.
3刀具半径补偿C(G40~G42)14.
3.
1刀具半径补偿功能如下图,用半径为R的刀具切削工件A,刀具中心路径为图中B,路径B距离A为R.
刀刀具中心路径刀具中心路径①②④③⑤⑥⑦⑧⑨⑩1140.
0R40.
020R20402020XYⅡ编程篇-14(补偿功能)14-10具象这样离开工件A一段距离称为补偿.
编程人员用刀具半径补偿模式编制加工程序,加工中,测定刀具半径并设入CNC,刀具路径变成补偿路径B.
14.
3.
2补偿量(H码)本系统最多可设置99个补偿量.
(与刀具长度补偿合计为99个)在程序中以H码指令后的两个数值即为补偿量,补偿量必须通过MDI/LCD单元设定.
补偿量的设定范围如下:mm输入inch输入补偿量0-±999.
999mm0-±999.
999inch注:№.
00或H00的补偿量必须设为0.
14.
3.
3补偿向量补偿向量是二维向量,等于H码指定的补偿值.
补偿向量的计算是在控制单元内完成,在每个程序段中,它的方向是随着刀具路径适时修改.
这个补偿向量在控制单元内完成,以便算出刀具移动须补偿多少,补偿路径(即刀具中心轨迹)等于编程路径加上或减去(由补偿方向决定)刀具半径.
补偿向量用重新设定取消.
补偿向量总是与刀具有关,在编制程序时,了解向量的状态是十分重要的.
14.
3.
4平面选择及向量补偿计算是在由G17,G18,G19所选择的平面内执行.
这个平面称为补偿平面.
例如,当选择XY平面时,在程序中用(X,Y)或(I,J)执行补偿计算和向量计算.
不在补偿平面的轴的坐标值不受补偿影响.
在同时进行三轴控制时,只对投影在补偿平面的刀具路径作补偿.
补偿平面的变更必须在取消补偿模式后进行.
如果在补偿模式中执行,系统会显示报警(P/S40),同时机械停止.
G码补偿平面G17X-Y平面G18Z-X平面G19Y-Z平面R补偿及向量B(补偿刀具中心路径)A向量Ⅱ编程篇-14(补偿功能)14-1114.
3.
5G40,G41及G42用G40,G41,G42指令刀具半径补偿向量的取消及进行.
它们与G00,G01,G02,G03指令组合,定义一个模式确定补偿向量的值,方向及刀具运动方向.
G码功能G40刀具半径补偿取消G41刀具半径左补偿G42刀具半径右补偿G41或G42使系统进入补偿模式,G40使系统取消补偿模式.
补偿程序示例如下:程序段(1)称为起动,在该段G41指令使补偿取消模式变为补偿模式.
在本段的终点,刀具中心用刀具半径垂直于下一段程序路径(从P1至P2)方向补偿.
刀具补偿量用H07指定,即补偿号码设为7,G41表示刀具路径左补偿.
补偿开始后,当工件形状编成如P1→P2……P8→P9→P1,刀具路径补偿自动执行.
刀具路径补偿C的程序示例Y轴X轴起点1210987643511P9(700,650)C2(1550,1550)P2(250,900)P4(950,900)P3(450,900)P4(500,1150)P5(900,1150)C1(700,1300)650R650R250RP7P8P1(1150,900)(1150,550)(250,550)Ⅱ编程篇-14(补偿功能)14-12G92X0Y0Z0;(1)N1G90G17G00G41H07X250.
0Y550.
0;(补偿量必须用补偿号码预先设定)(2)N2G01Y900.
0F150;(3)N3X450.
0;(4)N4G03X500.
0Y1150.
0R650.
0;(5)N5G02X900.
0R-250.
0;(6)N6G03X950.
0Y900.
0R650.
0;(7)N7G01X1150.
0;(8)N8Y550.
0;(9)N9X700.
0Y650.
0;(10)N10X250.
0Y550.
0;(11)N11G00G40X0Y0;14.
3.
6刀具半径补偿C的详细说明本节详细说明刀具半径补偿C(1)取消模式当系统初上电/复位/程序执行了M02、M30指令,系统控制处于刀具补偿取消模式.
向量在取消模式下一定是0,刀具中心路径与编程路径一致.
取消模式G40必须在程序结束前指定.
(2)补偿开始在取消模式下,当满足以下条件的程序段开始执行,系统进入补偿模式.
(a)含有G41或G42指令,或控制进入G41或G42模式.
(b)刀具补偿的偏置号不为0.
(c)指令补偿平面上的任何一轴(I,J,K除外)的移动,其移动量不能为零.
在补偿开始程序段,不能有圆弧指令G02,G03,否则产生报警(P/S34).
补偿开始段,读入两个程序段,第一个程序段读入并执行,第二个程序段进入刀具补偿缓冲区.
单程序段方式下,读入二个程序段,执行第一个程序段,然后停止.
在连续执行时,通常预先读入二个程序段,因此在CNC内部有三个程序段,一个为正在执行的程序段,下面的二个程序段进入缓冲区.
注:在以下经常遇到的术语'内侧''外侧'的含义如下:二个移动程序段交点的夹角大于或等于180°时称为'内侧',在0~180°时称为'外侧'.
1内侧2外侧程序路径α≥180°工件侧αα程序路径工件侧0°≤α0°Ⅱ编程篇-14(补偿功能)14-13(a)沿着拐角的内侧移动(α≥180°)(b)沿着拐角为钝角的外侧移动(180°>α≥90°)(C)沿着锐角的外侧移动(α0°)(i):直线→直线刀具中心路径程序路径LαSLG42r:补偿量在以下图中SL及C意义如下:S:单段停止点L:直线C:圆弧(ii):直线→圆弧刀具中心路径程序路径CαSLG42r(i):直线→直线刀具中心路径程序路径LαSLG42(ii):直线→圆弧刀具中心路径程序路径CSrαLG42(i):直线→直线刀具中心路径程序路径LSαLG42r(ii):直线→圆弧刀具中心路径程序路径CSαLG42rⅡ编程篇-14(补偿功能)14-14(d)沿着拐角为小于1度的锐角的外侧移动,直线→直线.
(α3)补偿模式在补偿模式,如果不连续指定二个或二个以上的非移动指令(辅助机能或暂停等),补偿将会正确执行,否则会产生切削过量或切削不足.
在补偿模式执行中不可变更补偿平面,否则会产生报警,同时刀具停止.
(a)沿着拐角的内侧移动(α≥180°)(i):直线→直线刀具中心路径程序路径LαSL交点(iii):圆弧→直线刀具中心路径程序路径LSαc交点(ii):直线→圆弧刀具中心路径程序路径CSαL交点(iv):圆弧→圆弧刀具中心路径程序路径CSαL交点程序路径以同一方法考虑下列情况(ii)圆弧→直线(iii)直线→圆弧(iv)圆弧→圆弧(i)直线→直线(v)小于1度内侧加工及补偿向量放大补偿向量刀尖中心路径rrSⅡ编程篇-14(补偿功能)14-16(b)沿着拐角为钝角的外侧移动(180°>α≥90°)(c)沿着拐角为锐角的外侧移动(α0°)(i):直线→直线刀具中心路径程序路径LαSL交点(ii):直线→圆弧刀具中心路径程序路径CrSαLL(iii):圆弧→直线交点SrCLL程序路径刀具中心路径αrCLSLrα刀具中心路径程序路径(IV):圆弧→圆弧(i):直线→直线刀具中心路径程序路径LαSLLrr(ii):直线→圆弧程序路径刀具中心路径LαSLLLrr(iii):圆弧→直线刀具中心路径程序路径LLαSCLrr(iv):圆弧→圆弧程序路径刀具中心路径LCLαCSrⅡ编程篇-14(补偿功能)14-17(d)特殊情况CRRSLLr圆弧扩展直线rr圆弧终点程序路径假想圆弧当编程圆弧不在终点时,其扩展直线如左图所示,假想一圆弧通过其终点,补偿以假想圆弧来作向量.
其形成的刀尖中心路径不同与考虑了圆弧扩展直线的偏置路径.
当圆弧-圆弧移动时可用同样的考虑.
(i)圆弧终点不在圆弧上刀具中心路径中心在左图,当刀具半径值小时,圆弧的补偿路径有交点,但是当半径变大,可能交点不存在.
刀具停止在前一程序段的终点并显示报警(P/S33).
(ii)没有交叉点时报警且停止程序路径当补偿量小时当补偿量大时BAP圆弧B的中心圆弧A的中心rr(iii)圆弧的中心与起点或终点一致在左图,会产生报警(P/S38)并停止在前一程序段的终点.
(G41)停止刀具中心路径Ⅱ编程篇-14(补偿功能)14-18Ⅱ编程篇-14(补偿功能)14-19(4)补偿模式在补偿模式,当满足以下任何一项条件的程序段执行时,系统进入补偿取消模式,这个程序段的动作称为补偿取消.
(a)指令G40(b)刀具半径补偿号码为0.
在执行补偿取消时,不可用圆弧指令(G03及G02).
如果指令圆弧会产生报警(P/S34)且刀具停止.
在补偿取消模式,控制执行该程序段及在刀具半径补偿缓冲寄存器中的程序段.
此时,如果单段程序执行模式,执行一个程序段后停止.
再一次按起动按扭,执行下一个程序段而不用读取下一个程序段.
以后控制在取消模式下,通常下一个要执行的程序段将会读入缓冲寄存器,其后的程序段不再读入刀具半径补偿缓冲器.
(a)沿着拐角的内侧移动(α≥180°)(b)沿着拐角的内侧移动(90°≤α0°)(i):直线→直线程序路径LαSLG40r刀具中心路径(ii):圆弧→直线刀具中心路径程序路径CαSLG40r(i):直线→直线刀具中心路径程序路径LαLG42G40G40r(ii):圆弧→直线刀具中心路径程序路径CαSLG42G40rⅡ编程篇-14(补偿功能)14-20(c)沿着拐角为锐角的外侧移动(α0°)(d)沿着拐角为小于1度的锐角的外侧移动,直线→直线.
(α0G42r刀具中心路径(ii):圆弧→直线刀具中心路径程序路径CαSLG40rⅡ编程篇-14(补偿功能)14-21(5)在补偿模式中变更补偿方向刀具半径补偿G码(G41及G42)决定补偿方向,补偿量的符号如下:补偿量符号G码+-G41左侧补偿右侧补偿G42右侧补偿左侧补偿特殊场合下,在补偿模式中可变更补偿方向.
但不可在起动开始程序段及其后面的程序段变更.
补偿方向变更时,没有内侧和外侧的概念.
下列的补偿量假设为正.
α小于1度程序路径刀具中心路径G42G40rLSL(i)直线→直线LLSrrG41G42程序路径刀具中心路径(ii)直线→圆弧rrG41CSLG42程序路径刀具中心路径rrG41CSLG42程序路径(iii)圆弧→直线刀具中心路径rrG41CCSG42刀具中心路径(iv)圆弧→圆弧程序路径Ⅱ编程篇-14(补偿功能)14-22(v)如果补偿正常执行,但没有交点时当用G41及G42改变程序段A至程序段B的偏置方向时,如果不需要补偿路径的交点,在程序段B的起点做垂直于程序段B的向量.
1:直线-----直线2:直线-----圆弧3:圆弧-----圆弧程序路径刀具中心路径LS补偿向量SLL单节A单节B(G42)(G42)(G41)(G42)(G41)程序路径刀具中心路径单节A单节BLSLS程序路径刀具中心路径程序段A程序段B(G41)(G42)C(G42)(G42)(G41)SC单节Br单节AⅡ编程篇-14(补偿功能)14-23(iv)刀具半径补偿使刀具中心路径长度在一周以上时.
通常不会产生上述状况.
但当G41及G42变更时,或用I,J,K指令G40时,可能会发生上述状况.
P1P2N7G41G42N5N6G41程序路径刀具中心路径(G42)N5G02G91X5000Y-7000;N6G41G02J-5000;N7G42G01X5000Y7000;此时,刀具中心路径不是圆弧,而是P1至P2的一段弧.
在某些条件下,可能会因为干涉检查出现报警.
如希望刀具按全圆移动,必须分段指令Ⅱ编程篇-14(补偿功能)14-24(6)暂时的补偿取消在补偿模式中,如果指定以下的指令,补偿会暂时取消,此后系统会将补偿模式自动恢复.
这个操作的详细方法,请参照补偿取消及补偿开始的详细说明.
(a)G28自动返回参考点在补偿模式中,如果指令G28,补偿将在中间点取消,在参考点返回后补偿模式自动恢复.
(b)G29从参考原点自动返回在补偿模式中,如指令G29,补偿将在中间点取消,补偿模式将在下一个程序段自动恢复.
在G28后立刻指令时不在G28后立刻指令时(7)补偿模式中的刀具半径补偿G码在补偿模式中,指定刀具半径补偿G码(G41,G42)时,相对于移动方向会形成一个与前程序段成直角的向量,与加工内侧和外侧无关.
但如果在圆弧指令中指定此种G码,则G28(G42G00)SSSG00rr原点中间点rrSSSG42G00G00中间点G29原点SSSSSG42G00G29G00中间点G28Ⅱ编程篇-14(补偿功能)14-25不能得到正确的圆弧.
当用刀具半径补偿G(G41,G42)改变补偿方向时,请参照(5).
直线-----直线圆弧-----直线(8)暂时取消补偿向量的指令在补偿模式中,如果指定了G42(绝对坐标编程),补偿向量会暂时取消,之后,补偿向量会自动恢复.
此时,不同于补偿取消模式,刀具直接从交点移动到补偿向量取消的指令点.
在补偿模式恢复时,刀具又直接移动到交点.
注:SS表示单段模式刀具停止二次的点.
(9)刀具不移动的程序段在以下程序段中没有刀具移动.
在这些程序段中,即使刀具半径补偿模式有效也不会移动.
含G42指令程序段LL(G42模式)Sr5含G42指令的程序段CSL(G42模式)rrrLSN5N6SSN8N9程序路径LS(交点)(交点)刀具中心路径LG50程序段N7(G41模式)N5G91G01X3000Y7000;N6X-3000Y6000;N7G92X1000Y2000;N8G01X4000Y8000;Ⅱ编程篇-14(补偿功能)14-26(1)M05M码输出(2)S21S码输出(3)G04X10000暂停不移动(4)(G17)Z100补偿平面内无移动指令(5)G90只有G码(6)G01G91X0;移动量是零(a)在补偿开始时的指令如果在补偿开始的指令没有刀具移动,不会产生补偿向量.
(b)在补偿模式指令时在补偿模式下只指令了一个无刀具移动的程序段时,向量及刀具中心路径与没有指令该程序段时一样.
(参照项目(3)补偿模式)此无刀具移动程序段在单程序段停止点执行.
但是,当程序段移动量是零时,即使只指定一个程序段,刀具移动同与两个及两个以上没有刀具移动指令的程序段一样,随后将详细说明.
两个没有刀具移动的程序段不可连续指令.
如果这样指令,会形成长度为补偿量,方向垂直于前程序段移动方向的向量,所以可能产生过度切削.
N7SSN6N8N9SG40G91.
.
.
N6X1000.
0Y1000.
0;N7G41X0;N8X-1000.
0;N7N8SSN8N6N6程序段N7在这里执行N6G91X100.
0Y200.
0;N7G04X100.
0;N8X100.
0;N7N8SSN6N6G91X1000Y2000;N7X0;N8X1000;N7N8N9N6G91X100.
0Y200.
0;N7S21;(note4)Ⅱ编程篇-14(补偿功能)14-27注:SSS表示用程序段操作刀具停止三次.
(c)与补偿取消一起指令时当与补偿取消一起指令的程序段没有刀具移动时,会形成长度为补偿量,方向垂直于前程序段移动方向的向量,这个向量在下一个移动指令取消.
(10)在补偿平面内,一个程序段包含G40及I--J--K--指令时.
(a)前面程序段是G41或G42模式时.
此时假设CNC已经指令从前面程序段的终点在(I,J或K)方向的移动量.
注意CNC求得刀具路径的交点与指定加工内侧或外侧无关.
N7N8N6SSN6G91X100.
0Y100.
0;N7G40;N8X100.
0Y0;SN2E(X,Y)(G42)N1(I,J)Xrr在G42程序段,刀具中心移动到X用G40程序段,刀具移动到该位置程序路径N1(G42模式);N2G40XYI-J-;EⅡ编程篇-14(补偿功能)14-28当求不到交点时,前程序段的终点刀具移动到垂直于前程序段的位置.
(b)刀具中心路径长度大于一圆周时.
在上图中,刀具中心路径不沿圆周移动,而沿圆弧从P1至P2.
在某些情况下,可能会因干涉检查产生报警(P/S41),随后将会说明.
(如想沿圆周移动,圆弧指令必须分割.
)(11)转角移动如在程序段结束时产生二个以上的向量,刀具从一个向量直线移动至另一个向量.
这个移动称为转角移动.
如果这些向量几乎一致,不执行转角移动,较后的向量忽略.
ErrXSG40(I,J)刀具中心路径程序路径VxVyN7(I,J)P2P1N5N6程序路径刀具中心路径(G41)N5G01G91X10000;N6G02J-6000;N7G40G01X5000Y5000I-100J-100;Ⅱ编程篇-14(补偿功能)14-29如果ΔVX≤ΔV极限及ΔVZ≤ΔV极限,较后的向量忽略.
ΔV极限用参数N0.
049CRCDL设定.
如果这些向量不一致,产生一个沿转角的移动.
这个移动属于较后的程序段.
但是,如果下一个程序段的路径超过半圆时,不执行以上机能.
理由如下:如果向量未忽略,刀具路径如下:P0→P1→P2→P3(圆弧)→P4→P5→P6→P7但是,如果P2及P3间的距离忽略,则P3忽略.
刀具路径如下:P0→P1→P2→P4→P5→P6→P7程序段N6的圆弧切削忽略.
这些移动属于程序段N7,进给率因此等于程序段N7的进给率.
如果程序段N7是G00模式,刀具以快速进给率移动.
如果是G01,G02,G03模式,刀具以切削进给率移动.
SN6N7N8P3,P4N7N5N4P7P0P1P2P5P6P7程序路径刀具中心路径N4G41G91X1500Y2000;N5X1500Y2000;N6G02J-6000;N7G01X1500Y-2000;N8G40X1500Y-2000;Ⅱ编程篇-14(补偿功能)14-28(12)干涉检查刀具过度切削称为"干涉".
干涉能预先检查刀具过度切削.
但是用本机能不能检查出所有的干涉.
即使过度切削未发生也会进行干涉检查.
(a)干涉的基本条件(1)刀具路径方向与程序路径方向不同.
(路径间的夹角在90度与270度之间).
(2)圆弧加工时,除以上条件外,刀具中心路径的起点和终点间的夹角与程序路径起点和终点间的夹角有很大的差异(180度以上).
例①刀具中心路径程序路径两个路径方向差异很大(180°)例②刀具中心路径程序路径两个路径方向差异很大(180°)刀具中心路程序路径中心N5N6N7r1r2Ⅱ编程篇-14(补偿功能)14-29(G41)N5G01G91X8000Y2000H01;N6G02Y-1600X3200I2000J-8000H02;N7G01X2000Y-5000;(H01刀具半径补偿量r1=2000)(H02刀具半径补偿量r2=6000)以上范例,程序段N6的圆弧在一个象限内.
但是在刀具补偿后,圆弧位于4个象限.
(b)干涉的预先处理(1)向量的移动引起的干涉当刀具补偿程序段A,B及C执行时,在A及B间产生向量V1,V2,V3及V4,在B及C间产生向量V5,V6,V7及V8,首先检查最近的向量.
如果发生干涉,将它们消去.
但是如果要忽略的向量在拐角的最后,它们不能消去.
干涉检查:V4及V5间-----干涉-----V4,V5削去V3及V6间-----干涉-----V3,V6削去V2及V7间-----干涉-----V2,V7削去V1及V8间-----干涉-----V1,V8不能消去如果在检查中,某一向量无干涉,则此后的向量不检查.
如果程序段B是圆弧移动,向量干涉会产生直线移动.
(例1)刀具从V1至V8直线移动刀具中心路径程序路径CCBCV1LV7V2SAV5V4V8V6SV3O1O2V4,V5:干涉V3,V6:干涉V2,V7:干涉V1,V8:不干涉如果在程序段A用单段操作刀具停止,刀具中心移至V3.
Ⅱ编程篇-14(补偿功能)14-30(例2)刀具直线移动如下:刀具路径:V1→V2→V7→V8(2)如果在处理(1)后仍有干涉发生,刀具停止,产生报警.
如果干涉在处理(1)后发生或检查开始只有一组向量而这组向量干涉,刀具在前面程序段执行后立即停止,显示报警(P/S41).
(如果用单程序段操作执行,刀具在程序段结束时停止.
)因为干涉忽略向量V2和V5后,干涉仍在向量V1及V6间发生.
报警显示且刀具立即停止.
CCO1O2V5V4ACV1LV2SV7LV6SV3B刀具中心路径程序路径V8V4,V5:干涉V3,V6:干涉V2,V7:干涉如果在程序段A用单段操作刀具停止,刀具中心移至V3.
然后将操作起动,移动刀具至V7或V8.
刀具中心路径程序路径ACBV2,V5:干涉V1,V6:干涉V1停止V5V2V6Ⅱ编程篇-14(补偿功能)14-31(c)实际上没有干涉,但作干涉检查.
范例如下:(1)凹处深度小于补偿量实际上没有干涉,但是因为在程序B段,程序的方向与刀具半径补偿的路径相反,刀具停止并显示报警.
(2)截沟深度小于补偿量如同例(1)刀具路径与程序路径方向相反.
(13)从MDI输入指令从MDI输入指令不执行补偿.
但是,当绝对指令编程的NC程序在自动运行过程中,用单段执行暂时停止时,插入执行MDI操作,然后再次起动自动运行,刀具路径如下:此时,传送下一个程序段起点的向量,并根据下两个程序段形成其它向量.
所以,从点PC后补偿可正确地执行.
程序路径刀具中心路径停止ABC程序路径刀具中心路径A停止BCMDI操作Vc1'在绝对指令的程序路径Vc1Vc2PBPDPAPB'V`B1VB1V`B2VB2PCⅡ编程篇-14(补偿功能)14-32当点PA,PB,PC以绝对指令编程时,程序段从PA至PB执行后用单段执行停止,插入MDI方式移动刀具.
向量VB1及VB2传送至V'B1及V'B2,在程序段PB→PC及PC→PD间的向量VC1及VC2重新计算.
但是,因为向量VB2没有再度计算,从点PC后补偿可正确地执行.
(14)手动操作刀尖半径补偿中的手动操作,请参照操作篇的手动操作.
(15)如果刀具长度补偿在刀具半径补偿中执行,刀具半径的补偿量视为被变更.
(16)补偿一般注意事项(a)指令补偿量补偿量用H码指定补偿量号码.
一旦指定,H码保持有效直到另一个H码被指定,或取消补偿.
H码除了用于对刀具半径补偿指定补偿量外,也用于刀偏的偏置值.
(b)变更补偿量通常,换刀时,补偿量必须在取消模式中变更.
如在补偿模式中变更补偿量,在程序段的终点计算新补偿量.
(c)补偿量的正负及刀具中心路径如果补偿量是负(-),程序中的G41及G42彼此交换.
如果刀具中心沿工件外侧移动,它将会沿内侧移动,反之亦然.
以下范例所示.
一般,制作程序时补偿量为(+).
当刀具路径如图(a)编程时,如果补偿量为负(-),刀具中心移动如图(b),反之亦然.
因而同一程序可切削成公形或母形,且它们之间的间隙可选择补偿量作调整.
(适用于补偿开始及取消是A型式.
)(d)用刀具半径补偿过度切削(1)用比刀具半径小的圆弧内侧加工时(a)刀具中心路径(b)刀具中心路径N8N6N7在程序段7计算的补偿量在程序段6计算的补偿量Ⅱ编程篇-14(补偿功能)14-33当转角半径小于刀具半径时,因为刀具的内侧补偿将产生过度切削,会产生报警且CNC停在单段程序开始位置.
因为刀具在用单段执行方式停止时会产生过度切削.
(2)比刀具半径小的截沟加工时因为刀具半径补偿强制刀具中心路径向程序路径反向移动,会产生过度切削.
(3)比刀具半径小的段差加工时如果在程序中有比刀具半径小的段差时,用圆弧加工指令这个段差的加工时,正常补偿的刀具中心路径变成与程序方向相反.
此时忽略最初的向量,刀具直线移动到第二个向量.
单段执行在这里停止.
如不在单段模式下加工,自动运行会继续.
如果段差是直线,不会产生报警,作正确切削.
但会残留未切削部分.
刀具中心路径程序路径如果CNC不停止会产生过度切削在单段操作,产生报警且操作停止在这里.
产生报警,操作停止程序路径刀具中心路径如果操作不停止会产生过度切削产生报警操作停止程序路径刀具中心路径圆弧中心圆弧加工单段终点直线移动如果最初的向量未忽略会产生过度切最初的向量忽略SⅡ编程篇-14(补偿功能)14-34(4)刀具半径补偿C的补偿开始及在Z轴移动一般是在加工开始时,刀具半径补偿有效后,刀具沿Z轴移动距工件一段距离.
上述情况,如想将沿Z轴的移动分为快速进给及切削进给,请参照以下程序:如在选择的平面未包含二个移动指令程序段,N6不能进入缓冲区,刀具中心路径如上图所示由N1计算出.
补偿向量不在补偿开始时计算,结果会产生过度切削.
必须对上例修改,修改如下:当执行N1时,程序段N2及N3进入缓冲区,用N1及N2间的关系执行正确补偿.
N1G91G00X50000Y50000H01;N3G01Z-30000F1;N6Y100000F2;执行N3时,N6也进入缓冲区,用它们之间的关系,如图右正确的执行补偿.
N6:补偿模式N3:在Z轴的移动指令N1:补偿开始如果程序段N3(Z轴移动指令)分开如下:N1G91G00X50000Y50000H01;N3Z-250000;N5G01Z-5000F1;N6Y100000F2;N6N3,N5在Z轴的移动指令N1N1G91G00X50000Y40000H01;N2Y10000;N3G01Z-25000F1;N5G01Z-5000F1;N6Y100000F2;(指令N2的移动方向与N6相同)N6N3,N5在Z轴的移动指令N2N1Ⅱ编程篇-14(补偿功能)14-3514.
4偏置量的程序输入(G10)刀具长度补偿和刀具半径补偿的补偿量可在程序中输入,指令格式如下:G10P__R__;P:偏置号R:偏置量被指令的偏置量是绝对值还是相对值由G90/G91来决定.
G90/G91也可编程在G10的前面.
Ⅱ编程篇-15(测量机能)15-115.
测量机能15.
1跳跃机能(G31)G31IP__F__;在G31后面通过指令轴的移动,可以进行与G01同样的直线插补.
在这个指令执行中,如果输入了跳跃信号(SKP诊断号001.
7),则该程序停止剩余部分,而开始执行下个程序段.
G31是非模态代码,仅在本程序段中有效.
根据下个程序段G90/G91指令,运动有所不同.
15.
1.
1后面的程序段是增量指令时:从跳跃信号中断的位置用增量值运动.
例:G31G91X100.
0F100;Y50.
0;15.
1.
2下一程序段是绝对指令,只指令一个轴指令轴移动至指令位置,没有指定的轴保持在跳跃信号输入位置.
例:G31G90X200.
0F100;Y100.
0;15.
1.
3下个程序段用绝对指令指定2轴时无论跳跃信号从什么地点输入,刀具都移到下个程序段指定的位置.
例:G31G90X200.
0F100;X300.
0Y100.
0;SKIP信号输入点100.
050.
0实际移动无SKIP信号时的移动SKIP信号输入点50.
0实际移动无SKIP信号时的移动(200.
0,0)(***,200.
0)实际移动无SKIP信号时的移动SKIP信号输入点(200.
0,0)xy100.
0200.
0300.
0100.
0Ⅱ编程篇-15(测量机能)15-2跳跃信号为ON时,通过读取宏系统变量#5041~#5044的值而知道跳跃点的位置,从而可以用来测量.
此外,在移动量不明确时,可以使用跳跃机能.
请参照机床厂家的说明书.
Ⅱ编程篇-16(工件坐标系选择)16-116.
工件坐标系选择16.
1工件坐标系(G54~G59)16.
1.
1工件坐标系不需G92设定,机床就有六个工件坐标系,由G54~G59可选择其中的任意一个坐标系.
G54·······工件坐标系1G55·······工件坐标系2G56·······工件坐标系3G57·······工件坐标系4G58·······工件坐标系5G59·······工件坐标系6这六个工件坐标系是由从机床零点到各自坐标系零点的距离(工件零点偏置)而设定的.
例:N10G55G90G00X100.
0Z20.
0;N20G56X80.
5Z25.
5;在上述例子中,从工件坐标系2下的位置(X=100.
0,Z=20.
0)快速定位至工件坐标系3的位置(X=80.
5,Z=25.
5).
如N20程序段为G91,则增量移动.
N20程序段开始执行时,绝对坐标位置值自动变成为在G57坐标系下的坐标值.
注:相对位置是否随着坐标系设置而设置取决于参数№005的PPD,PPD=0不变,=1变化.
YZXXYZ机床零点工件零点偏置Ⅱ编程篇-16(工件坐标系选择)16-2开机返回机床零点后,工件坐标系1~6就建立起来.
开机时选择G54(工件坐标系1).
位置画面的绝对位置是在当前坐标系下的坐标值.
注:当选择了工件坐标系的功能后,一般不需G92设定坐标系.
如用G92设定则会移动工件坐标系1~6.
勿将G92与G54~G59混用,除非要移动工件坐标系G54~G59.
在G54坐标系下,当刀具定位在(200,160)时如执行指令G92X100Y100;则工件坐标系1偏移向量A为(X',Y').
同时,所有其它的工件坐标系也偏移向量A.
16.
1.
2用编程指令移动或变更各工件坐标系(G10)当工件坐标系不足或由于加工程序不同而要求移动/变更工件坐标系时,使用以下指令:G90/G91G10L2PpX—Y—Z—;p=0~5:对应工件坐标系1~6.
X,Y,Z:各轴的工件零点偏置值.
(G90/G91:绝对/增量值).
注:L=1或省略时,为刀具偏置值.
16.
1.
3自动坐标系设定G55G56(100,20)N10N20(80.
5,25.
5)XXZZ(X2,Z2)(G90)N20(G91)(80.
5,25.
5)100200100160A100100刀具位置XYX'Y'Ⅱ编程篇-16(工件坐标系选择)16-3如选择了工件坐标系机能,设置参数№076~078为零.
如设定值不为零,返回参考点后,则所有的工件坐标系偏移设定值.
16.
1.
4工件零点偏置的显示及输入显示:在[设置]软菜单下,第三页为工件零点偏置值的显示.
也可按此子菜单下的[G54-59]直接选择.
输入:按光标↓键使光标依G55,G56···G59的顺序移动.
按光标↑键以其相反的方向移动.
用光标选择了坐标系后,键入地址键(X/Y/Z)后,键入该轴的工件零点偏置值,最后按[输入]键,则相应的数据输入.
16.
1.
5报警G10时,如P未编入或编入值不为0~5,或L值不为0或1,则会产生№031号报警.
设置O0001N0001设置X轴镜像=0Y轴镜像=0奇偶效验=0英制编程=0(0:公制1:英制)绝对编程=0(0:增量1:绝对)自动序号=1日期时间:2005-12-1414:00:00星期三数据输入:录入方式参开关[参开关]参数开关:√关开[工件坐标系设定]G54G55Y=0.
000Y=0.
000G56G57Y=0.
000Y=0.
000G58G59Y=0.
000Y=0.
000Z0.
000X=0.
000X=0.
000Z=0.
000Z=0.
000X=0.
000X=0.
000Z=0.
000Z=0.
000X=0.
000X=0.
000Z=0.
000Z=0.
000[机床坐标]X0.
000Y0.
000设置G54-59Ⅱ编程篇-17(用户宏程序)17-117.
用户宏程序把由一组指令实现的某种功能象子程序一样事先存入存储器中,用一个命令代表这些功能.
程序中只要写出该代表命令,就能实现这些功能.
把这一组命令称为用户宏程序本体,把代表命令称为"用户宏命令".
用户宏程序本体有时也简称宏程序.
用户宏指令也称为宏程序调用命令.
编程人员不必记忆用户宏程序本体,只要记住作为代表命令的用户宏指令就行了.
用户宏程序最大特点是在用户宏程序本体中,能使用变量.
变量间可以运算,并且用宏指令命令,可以给变量赋值.
17.
1用户宏指令用户宏指令是调用用户宏程序本体的命令.
指令格式如下:M98P;被调用的宏程序本体的程序号.
利用上述指令,可调用用P指定的宏程序本体.
17.
2用户宏程序本体在用户宏程序本体中,可以使用一般的CNC指令,也可使用变量,运算及转移指令.
用户宏程序的本体,以O后续的程序号开始,用M99结束.
17.
2.
1变量的使用方法主程序用户宏程序命令用户宏程序本体完成某功能的一组指令O8000;G65H01G90G00X#101.
.
.
.
.
.
.
.
.
G65H82.
.
.
;.
.
.
.
.
.
M99;程序号运算指令使用变量的CNC指令转移指令用户宏程序本体结束用户宏程序本体的构成Ⅱ编程篇-17(用户宏程序)17-2用变量可以指令用户宏程序本体中的地址值.
变量值可以由主程序赋值或通过LCD/MDI设定,或者在执行用户宏程序本体时,赋给计算出的值.
可使用多个变量,这些变量用变量号来区别.
(1)变量的表示用#后续变量号来表示变量,格式如下:#i(i=1,2,3,4……)(例)#5,#109,#1005(2)变量的引用用变量可以置换地址后的数值.
如果程序中有#i或者-#i,则表示把变量的值或者把变量值的负值作为地址值.
(例)F#103…当#103=15时,与F15指令是同样的.
Z-#110…当#110=250时,与Z-250是同样的.
G#130…当#130=3时,和G3是同样的.
用变量置换变量号时,不用##1000描述,而写为#9100,也就是#后面的"9"表示置换变量号,下面的三行是置换变量号的实例.
(例)#100=105,#105=500时.
X#9100和X500指令是同样的.
X-#9100和X-500指令是同样的.
注:1.
地址O和N不能引用变量.
不能用O#100,N#120编程.
2.
如果超过了地址所规定的最大指令值,不能使用.
#30=120时,M#30超过了最大指令值.
3.
变量值的显示和设定:变量值可以显示在LCD画面上,也可以用MDI键给变量设定值,其操作方法,请参照Ⅲ10.
3宏变量的设置一节.
17.
2.
2变量的种类根据变量号的不同,变量分为公用变量和系统变量,它们的用途和性质都不同.
(1)公用变量#100~#131,#500~#515公用变量在主程序以及由主程序调用的各用户宏程序中是公用的.
即某一用户宏程序中使用的变量#i和其它宏程序使用的#i是相同的.
因此,某一宏程序中运算结果的公用变量#i可以用于其他宏程序中.
公用变量的用途,系统中不规定,用户可以自由使用.
公用变量#100~131,切断电源时清除,电源接通时全部为"0".
公用变量#500~#515即使电源切断了也不能清除,其值保持不变.
(2)系统变量此变量的用途在系统中是固定的.
(A)刀具补偿量#1~#32系统读取到刀具补偿量用的系统变量#1~#32的值后,可以知道补偿量.
把值代入系统变量#1~#32,可以改变补偿量.
变量#1~#32与刀具补偿号1~32是对应的.
在补偿号1~32的值中,不作为补偿量使用的号,也可与公用变量(#500~#515)同等使用.
(B)接口输入信号#1000~#1015,#1032系统读取到作为接口信号的系统变量#1000~#1015的值后,便可知道接口输入信号的状态.
15141312111098Ⅱ编程篇-17(用户宏程序)17-315DIUI15UI14UI13UI12UI11UI10UI09UI08#1015#1014#1013#1012#1011#1010#1009#100876543210DIUI7UI6UI5UI4UI3UI2UI1UI0#1007#1006#1005#1004#1003#1002#1001#1000输入信号变量值接点闭1接点开0读到系统变量#1032后,将读取全部输入信号.
15#1032=Σ#(1000+i)*2i注:1.
不能把值代入系统变量#1000~#1032中.
2.
用诊断可以显示系统变量#1000~#1032.
№.
110UI0~UI7№.
111UI8~UI15(C)接口输出信号#1100~#1115,#1132可以给系统变量#1100~1115赋值,以改变输出信号的状态.
15141312111098DOUO15UO14UO13UO12UO11UO10UO09UO08#1115#1114#1113#1112#1111#1110#1109#110876543210DOUO7UO6UO5UO4UO3UO2UO1UO0#1107#1106#1105#1104#1103#1102#1101#1100变量值输出信号1接点闭0接点开通过给系统变量#1132赋值,可以一次输出全部输出信号(DO0~DO15).
#1132=Σ#(1100+i)*2i注:1.
当非0或1的值赋给系统变量#1100~#1115时,被认为是1.
2.
可以读取系统变量#1100~#1132的值.
15i=0i=0Ⅱ编程篇-17(用户宏程序)17-43.
系统变量#1100~#1115可以在诊断画面显示(№126,127).
4.
K100M数控系统具体宏输入或输出信号参照附录8.
(D)位置信息#5001~#5083读取系统变量#5001~#5083后,便可知道位置信息.
当毫米输入时单位为0.
001毫米,英寸输入时,单位为0.
0001英寸.
系统变量位置信息移动中读取刀具半径、长度补偿#5001X轴程序段终点位置(ABSIO)#5002Y轴程序段终点位置#5003Z轴程序段终点位置可不考虑刀尖位置(程序指令位置)#5041X轴现在位置(ABSOT)#5042Y轴现在位置#5043Z轴现在位置不可考虑刀具基准点位置(与绝对坐标值相同)#5080刀具半径补偿量#5081刀具长度补偿量(X轴)可#5082刀具长度补偿量(Y轴)#5083刀具长度补偿量(Z轴)注:不能给系统变量#5001~#5083赋值.
17.
2.
3运算命令和转移命令(G65)一般形式:G65HmP#iQ#jR#k;m:01~99表示运算命令或转移命令功能.
#i:存入运算结果的变量名.
#j:进行运算的变量名1.
也可以是常数.
常数直接表示,不带#.
#k:进行运算的变量名2.
也可以是常数.
意义:#i=#j#k运算符号,由Hm指定(例)P#100Q#101R#102……#100=#101#102;P#100Q#101R15……#100=#10115;P#100Q-100R#102……#100=-100#102;注1:变量值不含小数点.
各变量值所表示的意义同用各地址不带小数点所表示的意义是同样的.
(例)#100=10X#100……0.
01毫米(毫米输入时)注2:用G65指定的H代码,对偏置量的选择没有任何影响.
G65代码功能一览表Ⅱ编程篇-17(用户宏程序)17-5G代码H代码功能定义G65H01赋值#i=#jG65H02加算#i=#j+#kG65H03减算#i=#j-#kG65H04乘算#i=#j*#kG65H05除算#i=#j÷#kG65H11逻辑加(或)#i=#jOR#kG65H12逻辑乘(与)#i=#jAND#kG65H13异或#i=#jXOR#kG65H21平方根#i#j=G65H22绝对值#i=#jG65H23取余数#i=#j-trunc(#j÷#k)*#k见注G65H24十进制变为二进制#i=BIN(#J)G65H25二进制变成十进制#i=BCD(#J)G65H26复合乘除运算#i=(#i*#j)÷#kG65H27复合平方根#i#j#k22=+G65H31正弦#i=#j*SIN(#k)G65H32余弦#i=#j*COS(#k)G65H33正切#i=#j*TAN(#k)G65H34反正切#i=ATAN(#j/#k)G65H80无条件转移转向NG65H81条件转移1IF#j=#k,GOTONG65H82条件转移2IF#j≠#k,GOTONG65H83条件转移3IF#j>#k,GOTONG65H84条件转移4IF#j00+N号P/S报警注:trunc:小数部分舍去.
G65代码功能说明:(1)运算命令(A)变量的赋值,#I=#JG65H01P#IQ#J(例)G65H01P#101Q1005;(#101=1005)G65H01P#101Q#110;(#101=#110)G65H01P#101Q-#102;(#101=-#102)(B)加算#I=#J+#KⅡ编程篇-17(用户宏程序)17-6G65H02P#IQ#JR#K;(例)G65H02P#101Q#102R15;(#101=#102+15)(C)减算#I=#J-#KG65H03P#IQ#JR#K;(例)G65H03P#101Q#102R#103;(#101=#102-#103)(D)乘算#I=#J*#KG65H04P#IQ#JR#K;(例)G65H04P#101Q#102R#103;(#101=#102*#103)(E)除算#I=#J÷#KG65H05P#IQ#JR#K;(例)G65H05P#101Q#102R#103;(#101=#102÷#103)(F)逻辑加#I=#J.
OR.
#KG65H11P#IQ#JR#K;(例)G65H11P#101Q#102R#103;(#101=#102.
OR.
#103)(G)逻辑乘#I=#J.
AND.
#KG65H12P#IQ#JR#K;(例)G65H12P#101Q#102R#103;(#101=#102.
AND.
#103)(H)异或#I=#J.
XOR.
#KG65H13P#IQ#JR#K;(例)G65H13P#101Q#102R#103;(#101=#102.
XOR.
#103)(I)平方根#I#J=G65H21P#IQ#J;(例)G65H21P#101Q#102;(#101=#102)(J)绝对值#I=|#J|G65H22P#IQ#J;(例)G65H22P#101Q3102;(#101=|#102|)(K)取余数#I=#J-TRUNC(#J/#K)*#KTRUNC:舍取小数部分G65H23P#IQ#JR#K;(例)G65H23P#101Q#102R#103;(#101=#102-TRUNC(#102/#103)*#103)(L)十进制转换为二进制#I=BIN(#J)G65H24P#IQ#J;(例)G65H24P#101Q#102;(#101=BIN(#102))(M)二进制转换为十进制#I=BCD(#J)G65H25P#IQ#J;(例)G65H25P#101Q#102;(#101=BCD(#102))(N)复合乘除运算#I=(#I*#J)÷#KG65H26P#IQ#JR#K;(例)G65H26P#101Q#102R#103;(#101=(#101*#102)÷#103)(O)复合平方根#I#J#K22=+G65H27P#IQ#JR#K;(例)G65H27P#101Q#102R#103;(#101#102#10322=+)(P)正弦#I=#J·SIN(#K)(单位:1‰度)G65H31P#IQ#JR#K;Ⅱ编程篇-17(用户宏程序)17-7(例)G65H31P#101Q#102R#103;(#101=#102·SIN(#103))(Q)余弦#I=#J·COS(#K)(单位:1‰度)G65H32P#IQ#JR#K;(例)G65H32P#101Q#102R#103;(#101=#102·COS(#103))(R)正切#I=#J·TAM(#K)(单位:1‰度)G65H33P#IQ#JR#K;(例)G65H33P#101Q#102R#103;(#101=#102·TAN(#103))(S)反正切#I=ATAN(#J/#K)(单位:1‰度)G65H34P#IQ#JR#K;(例)G65H34P#101Q#102R#103;(#101=ATAN(#102/#103))注:1.
用度指定(P)~(S)的单位,单位是1‰度.
2.
在各运算中,当必要的Q,R没指定时,其值作为零参加运算.
3.
在各运算中,小数部分全部舍去.
(2)转移命令(A)无条件转移G65H80Pn;n:顺序号(例)G65H80P120;(转到N120程序段)(B)条件转移1#J.
EQ.
#K(=)G65H81PnQ#JR#K;n:顺序号(例)G65H81P1000Q#101R#102;当#101=#102时,转到N1000程序段,当#101≠#102时,顺序执行.
(C)条件转移2#J.
NE.
#K(≠)G65H82PnQ#JR#K;n:顺序号(例)G65H82P1000Q#101R#102;当#101≠#102时,转到N1000程序段,当#101=#102时,程序顺次执行.
(D)条件转移3#J.
GT.
#K(>)G65H83PnQ#JR#K;n:顺序号(例)G65H83P1000Q#101R#102;当#101>#102时,转到N1000程序段,当#101≤#102时,程序顺序执行.
(E)条件转移4#J.
LT.
#K(000Q#101R#102;当#10102时,转到N1000程序段.
当#101≥#102时,顺序执行.
(F)条件转移5#J.
GE.
#K(≥)G65H85PnQ#JR#K;n:顺序号(例)G65H85P1000Q#101R#102;当#101≥#102时,转到N1000程序段.
当#10102时,顺序执行.
(G)条件转移6#J.
LE.
#K(≤)G65H86PnQ#JR#K;n:顺序号(例)G65H86P1000Q#101R#102;当#101≤#102时,转到N1000程序段.
当#101>#102时,顺序执行.
(H)发生P/S报警G65H99Pi;报警号=i+500(例)G65H99P15;Ⅱ编程篇-17(用户宏程序)17-8发生P/S报警515.
注:1.
当转移地址的顺序号指定为正值时,开始是顺序方向然后是逆方向检索,指定负值时,开始是逆方向,然后是正方向.
2.
也可以用变量指定顺序号.
G65H81P#100Q#101R#102;当条件满足时,程序转到#100指定的顺序号的程序段.
17.
2.
4关于用户宏程序本体的注意事项(1)用键输入的方法在地址G、X、Y、Z、R、I、J、K、F、H、M、S、T、P、Q的后面按#键,#便被输入进去.
(2)在MDI状态,也可指令运算,转移命令.
除G65以外,其它地址数据能用键输入,而不能显示.
(3)运算、转移命令的H、P、Q、R必须写在G65之后,写在G65以前的地址只有O、N.
H02G65P#100Q#101R#102;.
.
.
错误N100G65H01P#100Q10正确(4)单程序段通常在运算、转移命令的程序段执行时,即使单程序段开关ON时也不停止.
但是根据参数(№.
013SBKM),可以使之单程序段停止.
这种情况一般用于宏程序调试.
(5)变量值在-232~+232-1的范围内,但只能正确显示-9999999~9999999.
超过上述范围时,显示*(6)子程序的嵌套可到四重.
(7)变量值只取整数,所以运算结果出现小数点时舍掉.
请特别注意运算顺序.
(例)#100=35,#101=10,#102=5#110=#100÷#101(=3)#111=#110*#102(=15)#120=#100*#102(=175)#121=#120÷#101(=17)上述情况#111=15,#121=17.
(8)运算、转移命令的执行时间,因条件不同而异,一般平均值可考虑为10毫秒.
17.
3用户宏程序实例17.
3.
1螺栓孔循环在圆心为基准点(X0,Y0)、半径为(R)的圆周上,始角为(A),加工N个等分孔.
第2孔第3孔YⅡ编程篇-17(用户宏程序)17-9X0,Y0为螺栓孔循环基准点的坐标值.
R:半径,A:始角,N:个数.
上述参数使用下面的变量.
#500:基准点X的坐标值(X0)#501:基准点Y的坐标值(Y0)#502:半径(R)#503:始角(A)#504:N个数N>0时,反时针转,个数N.
N0时,顺时针转,个数N.
以下的变量用于宏程序中的运算.
#100:表示第I个孔加工的计数(I)#101:计数的终值(=N)(IE)#102:第I个孔的角度(θI)#103:第I个孔的X坐标值(Xi)#104:第I个孔的Y坐标值(Yi)用户宏程序本体可写成下列形式:O9010;N100G65H01P#100Q#0;I=0G65H22P#101Q#504;IE=|N|N200G65H04P#102Q#100R360000;G65H05P#102Q#102R#504;θI=A+360°*I/NG65H02P#102Q#503R#102;G65H32P#103Q#502R#102;XI=XI+R·COS(θI)G65H02P#103Q#500R#103;G65H31P#104Q#502R#102;YI=YI+R·SIN(θI)G65H02P#104Q#501R#104;G90G00X#103Y#104;第I个孔定位.
M10;输出孔加工M代码.
G65H02P#100Q#100R1;I=I+1G65H84P-200Q#100R#101;当I0时,绘图位置向下或左方偏移.
三维时:a0时,绘图位置向轴正方向偏移.
a>0时,绘图位置向轴负方向偏移.
程序起点(130,150)409030XZⅢ操作篇-14(与驱动相关的特性说明)14-114与驱动相关的特性说明14.
1切削速度上限K1000M可连接步进电机或全数字伺服电机.
当连接步进机时,通过设置参数,可以对切削速度进行限速.
在切削过程中,如果给定的速度高于设定的速度上限(№045),则系统自动以设定的上限速度进给.
根据步进电机的矩频特性,转速的提高必伴随着输出力矩的降低.
如加工所需的力不足,就会产生失步,所以设定适当的上限速度可避免失步.
FnaLc10006=****F:切削速度上限(毫米/分)n:切削所需力矩下步进机允许的最大频率(Kpps)a:步距角(度)L:步进电机一转对应机床的移动量(毫米)c:步进电机和丝杠联结的齿轮比(直联时为1)例:n=10Kpps,a=0.
75(度),L=5(毫米)c=1F=6250毫米/分14.
2快速移动速度的设定快速移动仅用在机床空载时,这时,由于所需力矩小于切削时所需的力矩,n可提高,其速度的计算同上.
例:如n=15Kpps其它参数相同,其速度为:F=9375毫米/分14.
3电子齿轮比的设置不同螺距的丝杠与各种步距角的电机或不同一转脉冲数的伺服电机相配时,或通过各种变速齿轮联结时,通过系统的电子齿轮比参数设定,可以使编程与实际运动距离保持一致.
14.
3.
1步进电机时CMRCMDL1000=**360aCMR:指令倍乘系数(参数№015~017)CMD:指令分频系数(参数№018~020)a:步距角(度)L:步进电机一转对应机床的移动量(毫米)例a=0.
75L=5CMRCMD125=12系统最小输出单位是CMD/CMR=125/12(单位:0.
001毫米.
)注:1.
无论是配置何种步距角的电机,系统的最小编程单位都为0.
001毫米,而最小输出单位则取决于a及L,a,L愈小,分辩率愈高,但会使速度降低,反之,a,L愈大,速度愈高,但会使分辨率降低.
2.
设置范围1~127.
Ⅲ操作篇-14(与驱动相关的特性说明)14-214.
3.
2配置伺服电机时1000LCMDCMR*=PL:步进电机一转对应机床的移动量(毫米)P:电机一转反馈对应的脉冲数.
14.
4升,降速时间常数的设定有关升,降速时间常数的含义在'Ⅱ编程篇5.
3'中有详细的说明,用户可根据所选步进机的升速要求来进行设定.
14.
5参数设定14.
5.
1输出波形选择(由参数№005的PCMD选择)14.
5.
2返回参考点选择(参数№014ZRSZ,ZRSY,ZRSX)有两种回零方式可以选择:(1)回零方式(a):不含机械零点.
(不需减速挡块)①设定零点:移动轴至机床的某点,通过以下设定确认该点为机械零点,选择位置画面的第三页(综合页),按着〖取消〗键的同时,按CNC面板上的地址轴键则对应的轴的机床位置设置为零.
②回零过程:选择回零方式,一直按任意方向的手动轴向运动开关,至到机床以快速自动返回到由①设定的零点位置为止.
返回到零点后,操作面板上回零完成指示灯亮.
根据参数选择可以自动设定工件坐标系及开始螺距误差补偿.
注:1.
如产生失步,则此种回零方式会产生误差.
误差为失步的步数.
在此情况下进行螺补则不可能正确地进行.
2.
通过参数P011的ZRNL设置可使回零轴键自保.
(2)回零方式(b):含机械零点.
(需减速挡块及一转信号)选择回零方式,按着由参数设定方向的手动轴向运动开关,在减速点以前机床快速移动,碰到减速开关后以FL的速度移动到零点.
返回到零点后,操作面板上回零完成指示灯亮.
根据参数选择可以自动设定工件坐标系及开始螺距误差补偿.
注:如产生失步,则回零会消除由失步而产生的误差.
也就是说无论是否产生过失步,这种回零后的机床零点位置保持不变.
在此情况下进行螺补则可正确地进行.
(3)回零方式(c):含机械零点.
(需一个霍尔开关)详见附录7参数P007的说明.
脉冲波形输出:(PCMD=1)最大输出频率是512KPPS脉冲宽度为1微秒方波输出:(PCMD=0)最大输出频率是256KPPSⅢ操作篇-14(与驱动相关的特性说明)14-314.
5.
3可输出的最高频率选择(参数№004OTFP)根据系统不同的选择,最高输出频率有32/512KPPS两种选择(当选择方波输出波形时,÷2)当编程速率高于此频率时,会产生'驱动器报警:指令速率过大'.
14.
5.
4驱动器就绪信号电平选择(参数№009VRY4~X)开机后,系统向驱动器发出CNC准备好信号(MRDY,见连接手册),驱动器接收到后会给系统返回驱动器准备好信号.
如驱动器未准备好,会产生'驱动器报警:驱动器未绪'.
根据参数,可设置选择各轴驱动器就绪信号有效电平.
14.
5.
5驱动器报警信号电平选择(参数№009DAL4~X)当有驱动器报警信号时,会产生'驱动器报警:驱动器报警'.
根据参数,可设置选择各轴驱动器报警信号有效电平.
14.
5.
6配置步进机时的一些参数设置的注意事项当系统配置步进机时,由于其特性所至,为防止堵转,根据具体情况,一般需设置以下参数.
1反向间隙补偿补偿频率设置为最小.
P010/P011CPF4,3,2,1设置为0.
P011:BDEC=1以指数形式进行升降速,防止电机反方向时,间隙补偿输出过快而造成失步.
BD8=1间隙补偿输出频率为参数P010设置的1/8.
2当驱动器单向脉冲时(信号:方向+脉冲),设置P011参数:RVDL=1.
轴运动方向改变时,先输出方向信号延迟一段时间后脉冲信号再输出.
KSGN=1.
轴负向运动时,运动符号保持.
3加减速时间常数配置步进机时,指数或直线加减速时间常数通常设置的比配伺服机时大.
需根据具体的情况设置时间常数.
G00直线加减速时间常数:200~600.
G01指数加减速时间常数:100~300.
14.
6驱动器报警①011,021,031,041:X,Y,Z,4驱动器未绪.
说明见14.
5.
4②012,022,032,042:X,Y,Z,4驱动器报警.
当驱动器报警信号(ALM)为ON时,产生此报警.
③013,023,033,043:X,Y,Z,4指令速率过大.
说明见14.
5.
3Ⅲ操作篇-15(几点说明)15-115.
几点说明15.
1标准出厂参数的设置及存储器清除(1)按键〖输入〗+0开机时,会提示:'取盘,按RESET键确认,按CAN键取消(数字)'.
此时按RESET键,KND出厂标准参数自动设入,并且自动清除程序区,偏置区等.
标准出厂参数表见附录7.
根据用户不同的配置,请设定相应的参数,并请务必将相应的参数备份.
15.
2不检查软超程按着【EOB+取消】键开机,则系统不进行软限位检查.
在索引的第一页有操作提示.
也可通过设置参数70~75为0,而不检查软超程.
15.
3间隙补偿说明开机后,系统先自动检查反向间隙补偿参数的设定是否过大,如果过大系统将工作区的补偿参数清为零.
第一次进行反向间隙补偿的方向由参数设定.
如有机械参考点,返回参考点后,如果向反向移动,则开始补偿.
例:如果为正(+)向回参考点,则第一次向负(-)方向移动时,开始第一次补偿.
在无机械参考点时,又不进行参考点的返回.
请按下图开关机.
15.
4键盘及输入信号滤波键盘键及输入信号的滤波时间:参数P024.
设定时间=设定值*16毫秒出厂标准设定为2.
最大值设定8.
当有干扰信号时,根据情况设置.
15.
5开机不进入正常的画面开机时,如画面显示大字'准备未绪'而不进入正常画面时,通常是由于有急停信号输入,释放急停信号即可.
也可按软菜单键进入主画面,通过诊断页面观察相应的信号.
15.
6ROM奇偶报警,开机时CMOS数据丢失,RAM检查(1)ROM奇偶报警.
开机时或开机后,如产生如下报警:开机加工开始点及关机点设正回零方向(负向第一次补偿)如关机不在此点,补偿可能不对Ⅲ操作篇-15(几点说明)15-2MEMORYALARM:NO.
3ROMPARITY:0A00B00D0F00系统报警,请与KND公司联系.
(2)开机存储数据检查开机时,系统自动对电池保护数据区的一部分数据进行检查,如果这些数据发生变化,在LCD上显示:'电池保持数据未保持住,按RESET键继续'.
这时,按RESET键之前最好按下急停开关,检查以上数据是否正确,如果有错误其将改正后才可释放急停开关.
.
注:1.
按下急停开关时,系统显示在大字符'准备未绪',此时按任意的软菜单键就可以进入正常的显示画面.
2.
系统的正常运行,需要正确的参数,程序,偏置,PC数据(如计时器,计数器等),请用户在机床调试完成后务必把这些重要的数据保存到电子盘或通过RS232接口传递出来或纪录下,以备后用.
(3)工作RAM固定区域定时检查开机时或开机后,如产生如下报警:MEMORYALARM:NO.
2CMOSRAMERROR是系统报警,请与KND公司联系.
Ⅳ连接篇-1(系统结构)1-0第四篇连接篇Ⅳ连接篇-1(系统结构)1-1第四篇连接篇本篇介绍K1000MI系统的内部连接及设定、外部连接、机床接口连接等.
K1000MI系统所用的主板版本为:0012I-0000-W01Z-0106.
1.
系统结构1.
1系统组成KND1000MI系列数控系统主要由下列单元组成.
图1.
1说明了该系统的组成.
(1)CNC控制单元(2)附加操作面板(选择件)(3)数字交流伺服驱动器(4)伺服电机(5)电源变压器1100%0.
150%0.
0125%0.
001F0100%XZ100%MZXZXZX图1.
1电源变压器驱动器电机机床强电柜~380V附加面板开关电源(Q-120D)KNDCNCSeriesK1000MIF1F2F3F4F5修改存盘/654删除输入+321.
0-输出取消=J#KITSDLM插入切换EOB987F4thZYXRHPQGNO参数↓↑报警诊断图形→←机床索引设置位置程序刀补//复位RESET//+Z+Y-4+X-X+4-Y-Z反转停止正转主轴倍率主轴倍率点动润滑冷却换刀XYZ4th编辑自动录入回零单步手动M锁轴锁暂停启动DNCXY跳段Z段单4th转空Ⅳ连接篇-1(系统结构)1-21.
2CNC控制单元安装尺寸图1100%0.
150%0.
0125%0.
001F0100%XZ100%MZXZXZX图1.
2a正视图图1.
2b俯视图14146680反转停止正转主轴倍率主轴倍率点动快速编辑自动录入回零单步手动单段空转M锁轴锁润滑冷却换刀暂停启动8-Φ4.
6306mm6.
5128.
5±0.
1130±0.
1128.
5±0.
1293±0.
16.
5KNDCNCSeriesK1000MIF1F2F3F4F5修改存盘/654删除输入+321.
0-输出取消=J#KITSDLM插入切换EOB987F4thZYXRHPQGNO参数↓↑报警诊断图形→←机床索引设置位置程序刀补//复位RESET//+Z+Y-4+X-X+4-Y-ZXYZ4thDNCXY跳段Z段单4th转空400mmⅣ连接篇-1(系统结构)1-3图1.
2c侧视图1.
3附加操作面板尺寸图厚度为:100mm图1.
31414130±0.
1130±0.
1130±0.
1400mm90+0.
1100mm5Ⅳ连接篇-2(内部连接)2-12.
内部连接2.
1系统内部连接图LCD显示屏XS21XS24XS20XS25XS26键盘/液晶控制板XS23XS1XS3电源单元XS1电源XS50Y轴XS52X轴XS59主轴编码器XS54DIXS57DOXS58RS232XS55模拟主轴系统主板系统后盖板XS27LCD显示转接板XS3J1XS5XS4XS8XS1XS9XS60CANXS56附加面板XS61分离操作盒XS10XS53Z轴XS514轴00121-0000-W01Z-0106Ⅳ连接篇-2(内部连接)2-2图2.
1插座说明:1:键盘控制板及转接板XS20:与主控制板连接.
XS23:与主控制板连接.
XS25:与显示转接板连接.
XS26:与液晶屏背光电源连接时用.
XS27:与液晶屏背光电源连接时用.
J1:与键盘控制板连接.
XS3:与日立液晶屏连接时用.
2:主控制板XS1:开发用.
XS3:与键盘控制板连接.
XS4:开发用.
XS5:与键盘控制板连接.
XS8:与插头接口板电源连接.
XS9:与插头接口板插头连接XS10:与插头接口板插头连接.
3:系统外部连接插座XS1:电源插座.
XS57:系统输出(DO).
DB型25孔型插座.
XS54:系统输入(DI).
DB型25针型插座.
XS52:X轴驱动.
DB型15孔型插座.
XS50:Y轴驱动.
DB型15孔型插座.
XS53:Z轴驱动.
DB型15孔型插座.
XS51:4轴驱动.
DB型15孔型插座.
(四轴时选配)XS59:主轴编码器信号.
DB型15孔型插座.
XS58:RS232-C串口.
DB型9孔型插座.
XS55:模拟主轴接口.
DB型9针型插座.
XS56:机床附加操作面板.
DB型15针型插座.
XS61:分离操作盒.
DB型15针型插座.
XS60:CAN.
DB型9孔型插座.
2.
2电源插座信号排列+5V+5V0V+12V0V-12V0V+24VⅣ连接篇-2(内部连接)2-3图2.
22.
3主板设定开关的说明2.
4.
3主板板号:0012I-0000-W01Z-01060012I-0000-W01Z-0106主板插座、设定开关位置示意图开关设置(为出厂默认设置)含义1-2短接(配步进)X/Y/Z/4轴的VP电压为:+5V2-3短接(配伺服)X/Y/Z/4轴的VP电压为:+24V4断开运动指令输出为:脉冲+方向4短接运动指令输出为:正脉冲+负脉冲SA145、6、7、8短接(配伺服)回零一转信号(PC)电平为+5V各轴可单独设定,5对应4轴,6对Z轴,7对Y轴,8对X轴XS3-KEY&LCDXS8-电源插座12345678SA14SA5SA4SA34321876500121-0000-W01Z-0106Ⅳ连接篇-2(内部连接)2-4开关设置(为出厂默认设置)含义5、6、7、8断开(配步进)回零一转信号(PC)电平为+24V各轴可单独设定,5对应4轴,6对Z轴,7对Y轴,8对X轴开关设置(为出厂默认设置)含义SA1SA21,2短路系统固定设置,不要改动.
(正确设置,否则可能损坏液晶屏)SA3SA4SA5开路系统固定设置,不要改动.
SA6SA7SA6(1-2短路)SA7开路系统固定设置,不要改动.
SA8开路手动复位输入,正常状态下悬空.
SA91-2短路此处必须和SA1及SA2设置相同.
SA10短路此处必须短接,否则程序不执行.
SA11开路系统固定设置,不要改动.
SA122-3短路系统固定设置,不要改动.
SA13SA15开路系统固定设置,不要改动.
SA7SA63.
3VⅣ连接篇-3(外部连接)3-13.
外部连接3.
1系统外部连接框图3.
1.
1配步进机时的连接图注:主轴编码器接口为选择机能.
图3.
1.
1K1000M系列数控系统XS56W310附加操作面板XS54W400机床侧输入的信号XS57W410输出到机床侧的信号XS55W300变频器XS58W320通用PC机步进机XS52W11XX轴驱动器XS50W11YY轴驱动器步进机XS53W11ZZ轴驱动器步进机XS51W1144th驱动器步进机W204W20ZW20YW20XXS59W330主轴编码器XS60W420CAN总线接口XS61W600分离操作盒Ⅳ连接篇-3(外部连接)3-23.
1.
2配数字交流伺服时的连接图3.
1.
2K1000M系列数控系XS56W310附加操作面板XS54W400机床侧输入的信号XS57W410输出到机床侧的信号XS55W300变频器XS58W320通用PC机电源变压器~380V注1:主轴编码器接口为选择机能.
注2:X/Y/Z轴到伺服电机的连接和第4轴相同.
电缆编号对应如下:动力线W20XX轴反馈线W21X动力线W20YY轴反馈线W21Y动力线W20ZZ轴反馈线W21ZXS50W10YY轴驱动器W22YXS53W10ZZ轴驱动器W22ZXS51W1044th驱动器W224伺服电机W204W214XS52W10XX轴驱动器W22XXS59主轴编码器W330XS60W420CAN总线接口XS61W600分离操作盒Ⅳ连接篇-3(外部连接)3-33.
2CNC到驱动器的接口信号3.
2.
1CNC到驱动器的信号接口图CNC侧AM26LS31MRDY2DALMPC+MRDY1+12VDIR-DIR+538710219CP-CP+2KDRDY+12V42K+24V12,1314,15VP0VPC-1504.
7K+5VSA3控制11123SA14,位8~5对应X~4轴短接:PC信号电平为5V;断开:PC信号电平为24VSA141-2短接:VP电压为+5V;2-3短接:VP电压为+24VⅣ连接篇-3(外部连接)3-4注:短接开关设置详见图3.
2.
1b2-3~2-6页Ⅳ连接篇-3(外部连接)3-53.
2.
2连接器信号表XS52:DB15F(X轴)XS50:DB15F(Y轴)1XCP+2XDIR+93XPC+10XCP-XDIR-4XDRDY11XPC-5XDALM12VP613VP7XMRDY1140V8XMRDY2150V1YCP+2YDIR+93YPC+10YCP-YDIR-4YDRDY11YPC-5YDALM12VP613VP7YMRDY1140V8YMRDY2150VXS53:DB15F(Z轴)XS51:DB15F(4th轴)1ZCP+2ZDIR+93ZPC+10ZCP-ZDIR-4ZDRDY11ZPC-5ZDALM12VP613VP7ZMRDY1140V8ZMRDY2150V14CP+24DIR+934PC+104CP-4DIR-44DRDY114PC-54DALM12VP613VP74MRDY1140V84MRDY2150V图3.
2.
2b3.
2.
3信号说明(下列说明中的n表示X/Y/Z/4th)(1)运动指令信号(a)单脉冲输出时主板SA14的第4位断开)nCP+,nCP-;nDIR+,nDIR-.
nCP为指令脉冲信号,nDIR为运动方向信号.
这两组信号均为差分输出.
(b)双脉冲输出主板SA14的第4位短接)信号表中的nCP为负向指令脉冲信号,nDIR为正向指令脉冲信号.
Ⅳ连接篇-3(外部连接)3-6(2)机床参考点零位信号该信号的系统侧接收电路如下图所示:图3.
2.
3b用户应提供的nPC或nPC+信号的波形如下图所示:图3.
2.
3c仅用一个霍尔开关作为减速开关同时作回零零点信号时的连接方法如下:150nPC+CNC系统侧接收电路4.
7knPC-SA14设定开关*DECn参考点返回方向减速信号忽略参考点用编码器PC信号时用磁开关信号时(一转信号)(nPC或nPC+)*DECnnPC(nPC+)霍尔开关(NPN)+24V1.
5K/0.
5W+24VCNC系统侧外部电路nPC-SA14的8/7/6/5位Ⅳ连接篇-3(外部连接)3-7图3.
2.
3e注释:此为回零方式C,回零方向参数设置与手动回零轴方向相反.
参见参数说明.
(3)驱动器准备好信号nDRDY(输入)该信号在系统侧的接收电路如下:图3.
2.
3f输入到系统的信号有效电平可通过参数设定为低电平或高电平有效.
该类型的输入电路要求驱动器侧以下列方式提供信号:*DECnnPCnPC+信号参考点返回路径减速信号参考点回零高速回零低速回零方向设置手动回零轴方向0+12V2KnDRDY系统侧nDRDY0V方式一(电平信号)系统侧nDRDY0V方式二(触点信号)系统侧图3.
2.
3dⅣ连接篇-3(外部连接)3-8(4)驱动器报警信号nDALM(输入)与nDRDY信号相同,请参考nDRDY信号的说明.
(5)CNC系统准备好信号nMRDY1、nMRDY2(继电器触点输出)当CNC初始化正常后,该触点闭合.
如在运行中CNC检测到驱动器报警或发生了急停后,该触点断开.
(6)VP为系统向驱动器提供的电压类型(+5V或+24V),由SA14设定开关的第1,2,3位的设定情况决定.
3.
2.
4电缆制作说明(1)接KND-BD3H,BD3M步进电机驱动器时电缆的制作DB15针接指令接口DB15孔接驱动器信号管脚管脚信号nCP+11+PLnCP-99-PLnDIR+22+DIRnDIR-1010-DIRnDALM56+READY0V1414-READY屏蔽焊接在插头金属体上线材:RVVP6X0.
2mm2(双绞屏蔽电缆)图3.
2.
4a(2)日本安川交流伺服Σ-Ⅱ系列驱动器连接时指令电缆的制作插座XS52,XS50,XS53,XS51SIGX/Y/Z/4信号名称管脚管脚信号名称nCP17PULSEnCP-98*PULSEnDIR211SIGNnDIR-1012*SIGNnPC+319PCOnPC-1120*PCO0V1432ALM-nALM531ALM+nMRDY1740SV-ONnMRDY280V152SGVP=+24V1247+24VFG壳50FG线材:RVVP12x0.
2mm2(双绞屏蔽电缆)图3.
2.
3gⅣ连接篇-3(外部连接)3-9图3.
2.
4b(3)日本松下交流伺服MINAS-A/A4系列驱动器连接时指令电缆的制作插座XS52,XS50,XS53,XS51CN1X/Y/Z/4信号名称管脚管脚信号名称nCP+14PULS2nCP-93PULS1nDIR+26SIGN2nDIR-105SIGN1nPC+323OZ+nPC-1124OZ-nDRDY435SRDY+nALM537ALM+nMRDY1729SONnMRDY2834SRDY-0V1436COM-0V1533INH0V1541COM-0V1413GNDVP=+24V127COM+焊接在插头金属体上图3.
2.
4d(4)KND-SD100/200交流伺服驱动器连接时指令电缆的制作插头XS__:DB15MCN1:S360信号名称管脚管脚信号名称XCP+132PULS+XCP-933PULS-XDIR+234SIGN+XDIR-1035SIGN-XPC+35OZ+XPC-116OZ-0V1427ALM-ALM526ALM+XMRDY1710SONXMRDY280V1525SRDY-DRDY48SRDY+VP=+24V1318COM+焊接在插头金属体上36FGⅣ连接篇-3(外部连接)3-103.
3RS232-C标准串行接口KND1000MI数控系统可通过RS232-C串行接口与通用PC机进行通讯.
通讯用的电缆连接图如下.
XS58(DB9针)COMx(DB9孔)信号管脚管脚信号DCD19RXD23TXDTXD32RXDDTR44DTR0V550VDSR66DSRRTS71DCDCTS87RTS98CTS屏蔽焊接在插头金属体上线材:RVVP5X0.
2mm2图3.
33.
4模拟主轴接口的连接(连接到变频器)120V630V740V85SVC9XS55:(DB9针)CNC控制单元电压输入接口变频器XS55W130DB9孔图3.
4注释:该信号应尽可能的使用RVVP2X0.
5mm2的双绞屏蔽电缆传送.
线材:RVVP12x0.
2mm2(双绞屏蔽电缆)Ⅳ连接篇-3(外部连接)3-113.
5附加操作面板的连接3.
5.
1连接器信号表(XS56:DB15针)1KEY2ST93@SP100V0V4*ESP211+5V5HA12+5V6HB13+5V70V140V8+12V15+12V图3.
5.
13.
5.
2信号说明(1)KEY:钥匙开关信号(用于程序保护),高电平有效.
(2)ST:循环启动信号,与CNC操作面板中的循环启动按键的功能相同.
高电平有效.
(3)@SP:进给保持信号,与CNC操作面板中的进给保持按键的功能相同.
低电平有效.
(4)*ESP2:急停信号,与DI插座中的*ESP1的功能相同.
具体使用由用户决定.
(5)HA,HB:来自手摇盘的脉冲信号.
(6)*0V1~*OV8:倍率开关信号.
(7)0V/+5V/+12V为系统提供的电源信号.
注:1.
如附加面板不接KEY,ST,@SP时,可由诊断参数屏蔽.
2.
*ESP2主要是用于附加操作面板上的急停开关以方便于连接.
如不接或串接入*ESP1时,需从外部短接.
3.
信号KEY,ST,@SP和*ESP2的公共端为0V.
*OV2*OV1*OV8*OV4Ⅳ连接篇-3(外部连接)3-123.
5.
3信号连接示意图0102030405060708090100110120130140150COM(0V)*OV8*OV4*OV2*OV1倍率开关连接器图3.
5.
3KEYST@SP*ESP2+5V0VHAHB连接器XS56KEYST@SP*ESP20V+5V0VHAHBⅣ连接篇-3(外部连接)3-133.
6分离操作盒接口的连接3.
6.
1连接器信号表(XS61:DB15针)1KEY2ST93@SP100V0V4*ESP211+5V5HA12+5V6HB13+5V70V140V8+12V15+12V图3.
63.
6.
2信号说明(1)*1/*10/*100:外置手轮增量选择.
(2)*ESP3:急停信号,与附加面板插座中的*ESP2的功能相同.
(3)HA,HB:来自手摇盘的脉冲信号.
(4)HX/HY/HZ/H4:轴选择输入信号.
(5)0V/+5V/+24V:系统提供的电源.
*OV80V*1+24V+24V*10*100*ESP3H4HXHYHZⅣ连接篇-3(外部连接)3-143.
7主轴位置编码器的连接(G93攻丝用)系统侧插座型号为:DB15F(DB型15芯孔)焊接电缆的系统侧插头型号为:DB15M(DB型15芯针)KND系统配套的主轴位置编码器型号为:LF-102.
4BM-C05D,每转脉冲数为1024,工作电压为+5V(长春第一光学仪器厂产品).
插头XS59:DB15针编码器信号名称管脚管脚信号名称*MPCS3*PCSMPCS4PCS*MPBS5*PBSMPBS6PBS*MPAS7*PASMPAS8PAS+5V12+5V+5V13+5V0V140V0V150V焊接在插头金属体上线材:RVVP10x0.
2mm2(双绞屏蔽电缆)图3.
7Ⅳ连接篇-4(机床接口)4-14.
机床接口4.
1输入信号接口说明4.
1.
1直流输入信号A直流输入信号A是从机床到CNC的信号,它们来自机床侧的按键,极限开关,继电器的触点及接近开关.
(1)机床侧的触点应满足下列条件:a.
触点容量:DC30V、16MA以上.
b.
开路时触点间的泄漏电流应小于1MA(Vmax=26V).
c.
闭路时触点间的电压降应小于2V(电流8.
5MA,包括电缆的电压降).
(2)此类信号的信号回路如图4.
1.
1所示.
图4.
1.
14.
1.
2直流输入信号B直流输入信号B是从机床到CNC的信号,并且是在高速下使用的信号.
(1)机床侧的触点应满足下列条件:a.
触点容量:DC30V、16MA以上.
b.
开路时触点间的泄漏电流应小于1MA(Vmax=26V).
c.
闭路时触点间的电压降应小于2V(电流8.
5MA,包括电缆的电压降).
(2)此类信号的信号回路如图4.
1.
2a或4.
1.
2b所示.
CNC侧机床侧4.
7机床侧+24V电源+24V0VCNC侧电源0VⅣ连接篇-4(机床接口)4-2图4.
1.
2a图4.
1.
2b4.
2输出信号接口说明直流输出信号用于驱动机床侧的继电器和指示灯,本系统的输出电路为达林顿管输出.
4.
2.
1达林顿管输出有关参数(1)输出ON时的最大负载电流,包括瞬间电流200MA以下.
(2)输出ON时的饱和电压,200MA时最大为1.
6V,典型值为1V.
(3)输出OFF时的耐电压,包括瞬间电压为24V+20%以下.
(4)输出OFF时的泄漏电流为100μA以下.
CNC侧机床侧4.
7k机床侧+24V电源+24V0VCNC侧电源0VCNC侧机床侧R4.
7k机床侧+24V电源+24V0VCNC侧电源0VⅣ连接篇-4(机床接口)4-34.
2.
2输出驱动继电器回路图4.
2.
2注释:机床侧连接继电器等电感性负载时,必须使用火花抑制器.
并且火花抑制器应尽可能设置在靠近负载的部位(20cm以内).
机床侧连接电容性负载时,必须串联限流电阻,并且包括瞬间值在内,其电压、电流必须在额定值范围内使用.
4.
2.
3输出驱动指示灯图4.
2.
3注释:用晶体管输出直接点亮指示灯时,会产生冲击电流,很容易损坏晶体管,因此必须按照上图所示设计保护电阻.
包括瞬间值在内,其电压、电流必须在额定值范围内使用.
CNC侧CNC电源0V机床侧继电器机床侧+24V电源0V+24VCNC侧CNC电源0V机床侧机床侧+24V电源0V+24V保护电阻Ⅳ连接篇-4(机床接口)4-44.
3输入输出信号表4.
3.
1输入信号诊断表诊断000HGEARX16*DECXX14X13X12X11X10插座脚号XS54:9XS54:22XS54:23XS54:10XS54:24XS54:11XS54:25XS54:12宏输入UI3UI2UI1UI0外部手动+X-X硬限位*LMX*LPX松拉刀SOLAI【说明】HGEAR:模拟主轴手动换档输入信号.
参见本篇4-8页.
*DECX:X轴机械回零减速输入信号.
参见本篇4-7页.
UI3-UI0:宏指令输入信号.
参见编程篇17-1页.
+X/-X:外部手动运动轴选择输入信号.
*LMX/*LPX:硬限位输入信号.
参见本篇4-8页.
SOLAI:松拉刀开关信号.
详见编程篇10-1.
诊断001SKPX26*DECYX24HEX22X21X20插座脚号XS54:15XS54:16XS54:17XS54:18XS54:19XS54:20XS54:8XS54:21宏输入UIBUIAUI9UI8外部手动+Y-Y硬限位*LMY*LPY【说明】SKP:G31测量输入信号.
*DECY:Y轴机械回零减速输入信号.
UIB-UI8:宏指令输入信号.
*100/*10:外置手轮的进给倍率输入信号.
参见本篇4-10页.
+Y/-Y:外部手动运动轴选择输入信号.
*LMY/*LPY:硬限位输入信号.
参见本篇4-8页.
Ⅳ连接篇-4(机床接口)4-5诊断002SPALMX32*DECZ*ESPOV8OV4OV2OV1插座脚号XS54:4XS54:5XS54:6XS54:7XS56:14XS56:15XS56:7XS56:8外部手动+Z硬限位*LMZ【说明】SPALM:主轴报警信号输入.
*DECZ:Z轴机械回零减速输入信号.
*ESP:急停输入信号.
OV8-OV1:倍率开关输入信号.
+Z:外部手动运动轴选择输入信号.
*LMZ:硬限位输入信号.
诊断003X47X46X45X44*ESP2@SPSTKEY插座脚号XS54:14XS54:1XS54:2XS54:3XS56:4XS56:3XS56:2XS56:1回零减速*DEC4外部手动-Z主轴换档HIGILOWI硬限位*LPZ松拉刀SLIN【说明】*DEC4:4轴机械回零减速输入信号.
*ESP2:附加面板急停开关输入信号.
SP:附加面板进给保持开关输入信号.
ST:附加面板循环启动开关输入信号.
KEY:程序保护开关输入信号.
-Z:外部手动运动轴选择输入信号.
HIGI/LOWI:模拟主轴自动换档输入信号.
*LPZ:硬限位输入信号.
SLIN:紧刀到位信号.
详见编程篇10-1.
Ⅳ连接篇-4(机床接口)4-6位号:76543210*ESP3H4HZHYHX*100*10*1XS61:12XS61:3XS61:2XS61:1诊断号004插座脚号XS61:13XS61:14XS61:9XS61:4【说明】*ESP3:急停开关输入信号.
H4/HZ/HY/HX:外置手轮轴选择输入信号.
诊断参数198的EHPG=1时有效.
*100/*10/*1:外置手轮增量输入信号.
4.
3.
2输出信号诊断表位号:76543210ZDVOIM05M32M08M10M04M03诊断号048XS57:15XS57:2XS57:14XS57:1XS57:3XS57:16XS57:4XS57:17插座脚号【说明】ZD:主轴制动输出信号.
VOI:报警时,输出给外部蜂鸣器信号.
M05:主轴停止输出信号.
M32:润滑油开输出信号.
M08:冷却液开输出信号.
M10:代码M10输出信号.
M04:主轴反转输出信号.
M03:主轴正转输出信号.
位号:76543210FNLENBSRDYM33M09M11STLALM诊断号049XS57:19XS57:6XS57:18XS57:5XS57:7XS57:20XS57:8XS57:21插座脚号【说明】FNL:加工完成指示信号.
ENB:模拟主轴输出指示信号.
SRDY:驱动准备好指示信号.
STL:系统自动运行指示信号.
ALM:系统报警指示信号.
M33:润滑油关脉冲输出信号.
M09:冷却液关脉冲输出信号.
Ⅳ连接篇-4(机床接口)4-7M11:代码M11脉冲输出信号.
位号:76543210S08S07S06S05S04S03S02S01UO7UO6UO5UO4UO3UO2UO1UO0HIGLOWSOLAO诊断号050XS57:23XS57:10XS57:22XS57:9XS57:11XS57:24XS57:12XS57:25插座脚号宏输出主轴换档松拉刀【说明】S08-S01:主轴机械换档输出信号.
UO7-UO0:宏指令输出信号.
HIG:模拟主轴高档输出信号.
LOW:模拟主轴低档输出信号.
SOLAO:松刀输出信号.
详见编程篇10-1.
4.
3.
3输入输出信号在插座XS54和XS57中的排列输入信号在插座XS54中的排列输出信号在插座XS57中的排列X4714SKP15X2616*DECY17X2418HE19X2220X2021X1622*DECX23X1324X1125X461X452X443SPALM4X325*DECZ6*ESP17X218HGEAR9X1410X1211X1012131VOI2M103M044M055ENB6M117STL8SRDY9S0710S0311S0212S061314M3215M0316M0817ZD18M3319ALM20M0921FNL22S0523S0124S0425S08注释:1.
表中的X**和Y**的功能由有关参数定义.
Ⅳ连接篇-4(机床接口)4-82.
4轴铣床系统时,X35为第四轴机械回零减速信号*DEC4.
输入信号在插座XS56中的排列输入信号在插座XS61中的排列1KEY2ST93@SP100V0V4*ESP211+5V5HA12+5V6HB13+5V70V140V8+12V15+12V1KEY2ST93@SP100V0V4*ESP211+5V5HA12+5V6HB13+5V70V140V8+12V15+12V4.
4输入输出信号说明KND-1000M系统共有40个输入信号、24个输出信号,每个输入/输出信号可能有多重功能,但一般只能用其一.
具体使用方法介绍如下:4.
4.
1输入信号(1)*DECX、*DECY、*DECZ及*DEC4减速开关信号该信号在返回机械参考点时使用,为常闭触点.
返回参考点的过程如下:选择手动方式,按下回零键,之后按相应轴的手动进给键,则机床将以快速移动速度向参考点方向运动.
当返回参考点减速信号(*DECX、*DECY、*DECZ及*DEC4)触点断开时(压上减速开关),进给速度立即下降,之后机床以固定的低速继续运行.
当减速开关释放后,减速信号触点重新闭合,之后系统检测编码器的一转信号或者磁开关信号(PC信号).
如该信号由高电平变为低电平(检测PC信号的下降沿),则运动停止.
同时点亮操作面板上相应轴的回零指示灯.
返回参考点操作结束.
在回零键释放之前,手动进给将一直无效.
每一个轴的返回参考点方向可以由参数进行设定.
在与各轴设定的返回方向相反的方向进行回零操作时,首先越过设定的参考点,之后再向设定的方向运动直至到达参考点.
连接图如下所示:CNC侧电源0V控制单元*DECX*DECY*DEC4*DECZ机床侧+24V电源0V+24VKEY*OV8*OV4*OV2*OV1*1+24V+24V*10*100*ESP3H4HXHYHZⅣ连接篇-4(机床接口)4-9图4.
4.
1a(2)HGEAR信号该信号为模拟主轴高低齿轮换档输入信号(手动).
低电平"0"为低速齿轮,高电平"1"为高速齿轮.
(3)SKP信号G31测量的跳跃信号.
(4)UI0~UI3,UI8~UIB信号这组信号无特别的定义,可由用户定义.
它们的值在系统内部自动赋给宏变量(#1000~#1003、#1008~#1011),与其它判断转跳宏指令一起使用可作各种处理.
#1000~#1003,#1008~#1011是对应各点的值(0或1).
(5)*LMX/*LPX/*LMY/*LPY/*LMZ/*LPZ:硬件限位输入信号连接图如下:-X*LMZ*LMX*LPZ-Z-Y+24V限位开关*LPYCNC系统+Z*LMY+X+Y*LPX当机床超程时,碰到相应开关,开关断开,系统显示超程报警,机床减速后停止下来.
此时,手动方式可以向报警的反向运动(同向运动时,无效),从而退出报警区域.
这时,机床与系统位置保持一致,不需回零即可继续加工.
设置诊断参数200的MOT=0时,屏蔽以上硬限位.
但软限位有效,应注意区别.
(6)SPALM信号主轴单元报警信号,高电平"1"为报警.
(7)*ESP1紧急停止信号该信号为常闭触点信号.
当触点断开时,控制系统复位,并使机床紧急停止.
通常这个信号由按钮开关的B触点指令.
产生急停后,系统准备好信号MRDY将断开.
同时封锁运动指令输出.
本系统具有软件限位功能和硬限位接口,用来进行超程保护.
如果系统输入接口X47/X32/X24/X26/X14/X16被定义成其它功能而不能用作硬限位输入接口时,可利用Ⅳ连接篇-4(机床接口)4-10*ESP1作为硬限位输入接口.
连接图如下所示:图4.
4.
1b(8)*OV1,*OV2,*OV4,*OV8来自附加操作面板中的倍率开关信号,公共端为0V.
(9)+X/-X/+Y/-Y/+Z/-Z:外部手动运动轴选择输入信号当设置诊断参数199的EJOG=1时,如果面板选择手动方式,则这些输入信号可以控制相应的轴运动.
(10)HX/HY/HZ/H4/*1/*10/*100:外置手轮输入信号HX=1:选择X轴.
HY=1:选择Y轴.
HZ=1:选择Z轴.
H4=1:选择4轴*100=1:手轮增量为0.
1毫米.
*10=1:手轮增量为0.
01毫米.
+X-X+Y-Y+Z-Z急停继电器EMG急停暂时解除火花抑制器*ESP1+24V控制单元EMG1EMG2驱动器驱动器电源继电器电源Ⅳ连接篇-4(机床接口)4-11*1=1:手轮增量为0.
001毫米.
【注】诊断参数199的EHPG=1时有效.
当输入信号HX/HY/HZ/H4都变成0后,系统自动恢复为原面板方式.
(11)HIGI/LOWI:模拟主轴自动换档输入信号来自模拟主轴的高、低档到位信号.
用于模拟主轴自动换档.
(12)*ESP2来自附加操作面板的急停信号,该信号为CNC系统的第二个急停信号输入点.
可用参数屏蔽.
(13)@SP:进给保持信号来自附加操作面板的进给保持信号,该信号和CNC操作面板中的进给保持按键的功能相同.
可用参数屏蔽.
(14)ST:循环启动信号来自附加操作面板的循环启动信号,该信号和CNC操作面板中的循环启动按键的功能相同.
可用参数屏蔽.
(15)KEY:程序保护开关信号来自附加操作面板的程序保护开关信号,在CNC系统的软菜单按键中有与之功能相同的按键.
可用参数屏蔽.
4.
4.
2输出信号本系统的输出信号全部由达林顿管提供,输出有效时相应的达林顿管导通(低电平).
所有输出信号的公共端为用户提供的+24V.
(1)M03,M04,M05:主轴控制用M代码M03为主轴正转,M04为主轴反转,M05为主轴停止.
(2)M08,M09:冷却液控制M08为冷却液开,M09为冷却液关.
(3)M10,M11:M代码输出信号M10为开,M11为关.
(4)M32,M33润滑油控制M32为润滑油开,M33为润滑油关.
(5)S1~S8主轴速度信号S1~S8表示八挡主轴速度,同时只有一个信号有效.
(6)UO0~UO7信号这8个信号可由用户定义,通过给宏变量(#1100~#1107)赋值进行输出"1"或者"0".
(7)加工完成指示信号FNLⅣ连接篇-4(机床接口)4-12当程序执行M30后,FNL输出为"1".
按下循环启动或复位键时,FNL将变为"0".
(8)主轴模拟输出指示信号ENB当选择模拟主轴功能时,如输出模拟电压为0V则信号ENB为"0",否则信号ENB为"1".
(9)驱动准备好指示信号SRDY当系统收到驱动器准备好信号后,输出该信号.
(10)系统自动运行指示信号STL当系统自动运行时,输出该信号.
(11)系统报警指示信号ALM当系统报警时,输出该信号.
(12)主轴制动信号ZD动作关系如下:图4.
4.
2aT1:当主轴在运行中时,发出主轴停止(自动或手动)命令后,先使能轴互锁信号,延迟T1后,发出主轴停止信号.
T1参数设定在诊断号214处,一般设定在200毫秒左右.
T2:从发出主轴停止信号到发出主轴制动信号的延迟时间.
设定在诊断号215和216中.
T3:主轴制动时间,设定在诊断号217和218中.
设定范围为0.
5~5秒.
(13)外部蜂鸣器信号VOI报警时:图4.
4.
2b主轴制动主轴停止停止命令轴互锁主轴正/反转T3T2T11S1SⅣ连接篇-4(机床接口)4-13(14)模拟主轴高/低档输出信号:HIG/LOW用来控制模拟主轴的换档.
4.
4.
3M代码电平/脉冲输出说明M代码一般为电平输出,当参数009的MPLS设为1时,M码为脉冲方式输出.
脉冲宽度由诊断№208设置.
(1)面板上手动键为自锁型,为OFF,ON,OFF.
.
.
变化,由ON变为OFF时系统自动发出M33,M11,M09,M05的脉冲信号.
由OFF变为ON时系统自动发出M32,M10,M08,M03/04脉冲信号.
(2)程序执行M33,M11,M09,M05码时,如果NC已处于OFF状态时(由系统自动记忆),则系统不发出M33,M11,M09,M05等脉冲信号.
同样,在NC已处于ON的状态时,如果再执行ON的M代码,ON的脉冲也不输出.
(3)急停时,不论在什么状态,系统发出M33,M11,M09,M05.
(4)按复位键时,如果参数RSJG设置为1,则不论在什么状态,系统发出M33,M11,M09,M05.
当在机床侧装置有这些开关时,在机床侧进行起动或关闭的操作后,最后应恢复为和系统一致.
否则需进行两次操作.
如:在NC侧起动了冷却,而在机床侧关闭了,为在NC侧再次起动需发OFF,ON才能起动或在复位后在起动.
Ⅴ附录篇-1(螺距补偿)1-0第五篇附录篇Ⅴ附录篇-1(螺距补偿)1-1第五篇附录篇附录1关于记忆型螺距误差补偿功能1.
功能每轴的螺距误差,可以用最小移动单位补偿.
2.
规格把参考点作为补偿原点,在各轴设定的各补偿间隔上,把应补偿的值作为参数设定.
(A)可以补偿的轴:X,Y,Z轴.
(B)补偿的点数各轴128点(X,Y,Z轴)(C)补偿量范围每个补偿点0~±7*补偿倍率(最小移动单位).
补偿倍率*1,*2,*4,*8,*16(全轴通用)(D)补偿间隔移动单位最小设定间隔最大设定间隔单位公制800099999990.
001MM英制400099999990.
0001英寸(最大补偿范围=设定间隔*128)实际的补偿间隔:在上述范围内,根据最大补偿范围和机械行程,设定最合适的值.
对于直线轴,如果设定间隔为上述的最小间隔,则往往不能在期待的位置进行补偿.
此时,应降低快速进给速度.
3.
参数设定关于螺距误差参数,在MDI方式或紧急停止状态,用下述参数设定.
3-1螺距误差补偿倍率013PML3PML2PML1输出被设定的补偿量与此倍率的乘积.
(全轴通用)PML2PML1倍率乘积00*101*210*411*8Ⅴ附录篇-1(螺距补偿)1-2当PML3=1时,上述值*163-2螺距误差原点100PECZRX300PECZRY500PECZRZPECZRX,Y,Z螺距误差原点:这是设定螺距误差表上的原点位置.
根据机械的要求,每个轴可设定0~127的任意值.
3-3设定补偿间隔079PECINTX080PECINTY081PECINTZPECINTX,Y,Z:螺距误差补偿间隔.
这是设定螺距误差补偿间隔.
要设定大于8000(公制系),大于4000(英制系)的正数.
另外,如果设定0,则不补偿.
3-4设定补偿量各轴螺距误差补偿量,请按下表的参数号设定.
轴名参数号X轴101~228Y轴301~428Z轴501~628非上表中的参数号,不能设定补偿量.
另外,可设定补偿量的范围是0~±7,超过这个范围的值的输入无效.
例:220-7在上例中,补偿数据-7表示是设置在X坐标120点的补偿值.
Ⅴ附录篇-1(螺距补偿)1-3Ⅴ附录篇-1(螺距补偿)1-44.
各种参数设定例子(1)螺距误差原点=0,补偿间隔=10.
000补偿点开头对应于参考点,补偿点1对应于从此参考点向正方向移动10000的位置,往后,每隔10000,对应一个补偿点,第127个补偿点为1270000处的补偿量.
所以,在补偿点1,设定从0运动到10000时的补偿量,在补偿点2,设定从10000运动到20000时的补偿量.
在补偿点N,设定从(N-1)*(补偿间隔)运动到N*(补偿间隔)时的补偿量.
上例是补偿下述区间误差的实例区间0~10000+710000~20000-620000~30000+4实际上,机械从参考点运动到+30000的位置,螺距误差只补了(+7)+(-6)+(+4)=+5(2)螺距误差原点=60,补偿间隔=10000补偿表中第61号(60)对应于参考点(补偿点61对应于从原点正向10.
000的点).
以后,每隔10000,对应一个补偿点,第127个补偿点为+670000处的补偿量.
而补偿点59,对应于从参考点负方向运动10000点,以下,每一10000对应一个补偿点,补偿点0为-60000处的补偿量.
所以,对于补偿点N设定从(N-61)*(补偿间隔)运动到(N-60)*(补偿间隔)的补偿量.
上例中,补偿了下述区间的误差:区间-30000~-20000-7-20000~-10000-7-10000~0+60~10000+4实际上,机械从-30000运动到+10000时,螺距误差只补偿了(-7)+(-7)+(+6)+(+4)=(-4)设定点机床坐标系(参考点)0+10.
000+20.
000+30.
0000123(0)(+7)(-6)(+4)127+1270.
000(+2)设定点机床坐标系(参考点)0+10.
000-20.
000-60.
00058596061(-7)(-7)(+6)(+4)127+670.
000(+1)(+0)-10.
000Ⅴ附录篇-1(螺距补偿)1-5(3)螺距误差原点=127,补偿间隔=10000补偿表的末尾,对应着参考点.
补偿点126对应于从参考点向负方向运动10000所得到的点.
以下,每隔10000,对应于一个补偿点,补偿点1为-1260000处的补偿量.
所以,补偿点127应设定从0运动到-10000时的补偿量,补偿点126,应设定从-10000运动到-20000时的补偿量,补偿点N,应设定从(N-128)*(补偿间隔)运动到(N-127)*(补偿间隔)时的补偿量.
上面的例子,是补偿下述区间误差的实例.
区间-40000~-30000+3-30000~-20000-7-20000~-100000-10000~0+2实际上,机械从-40000运动到参考点,螺距误差只补偿了(+3)+(-7)+(0)+(+2)=(-2)5.
补偿量的设定方法如上一节所示,设定的补偿量与下列因素有关.
.
参考点和补偿点的位置关系.
机械移动方向.
补偿间隔补偿点N(N=0,1,2,3,…127)的补偿量,由区间N,N-1的机械误差(相对于移动指令量,运动的差值)来决定.
补偿量的输入方法对于MDI&LCD,通常用与参数输入完全相同的方法,可以输入补偿量.
补偿量的输出用与通常的参数输出同样的方法,把各轴的补偿量输出.
设定的注意事项(1)补偿间隔的设定(参数100,300,500)补偿间隔是正值时,用此值进行补偿.
补偿间隔是负值时,取绝对值进行补偿.
补偿间隔是零时,此轴不进行补偿.
(即使输入负的间隔,也变成正值后显示)(2)设定了螺距误差参数后,重新返回参考点.
(3)螺距误差补偿量(参数101~628)设定点机床坐标系(参考点)0-30.
000-20.
000-1270.
000124125126127(+3)(-7)(0)(+0)-10.
000(+2)Ⅴ附录篇-2(G功能一览表)2-1附录2G功能一览表G代码组别功能G00定位(快速移动)*G01直线插补(切削进给)G02圆弧插补CW(顺时针)G0301圆弧插补CCW(逆时针)G04暂停,准停G1000偏移值设定*G17XY平面选择G18ZX平面选择G1902YZ平面选择G20英制数据输入G2106公制数据输入G27返回参考点检查G28返回参考点G29从参考点返回G31测量功能G3900拐角偏移圆弧插补*G40刀具半径补偿注消G41左侧刀具半径补偿G4207右侧刀具半径补偿G43正方向刀具长度偏移G44负方向刀具长度偏移*G4908刀具长度偏移注消*G54工件坐标系1G55工件坐标系2G56工件坐标系3G57工件坐标系4G58工件坐标系5G5905工件坐标系6G6500宏程序命令Ⅴ附录篇-2(G功能一览表)2-2G代码组别功能G73钻深孔循环G74左旋攻丝循环G76精镗循环*G80固定循环注销G81钻孔循环(点钻循环)G82钻孔循环(镗阶梯孔循环)G83深孔钻循环G84攻丝循环G85镗孔循环G86钻孔循环G87反镗孔循环G88镗孔循环G8909镗孔循环G9301刚性攻丝循环*G90绝对值编程G9103增量值编程G9200坐标系设定G98在固定循环中返回初始平面G9910返回到R点(在固定循环中)注:1.
带有*记号的G代码,当电源接通时,系统处于这个G代码的状态.
G20,G21为电源切断前的状态;G00,G01可以用参数设定来选择.
2.
00组的G代码是一次性G代码.
Ⅴ附录篇-3(指令值范围一览表)3-1附录3指令值范围一览表输入毫米输入英寸输入毫米输入英寸输入单位有效范围输出毫米输出毫米输出英寸输出英寸最小输入增量0.
001毫米0.
0001英寸0.
001毫米0.
0001英寸最大行程±99999.
999毫米±99999.
999毫米±9999.
9999英寸±9999.
9999英寸最大编程尺寸±9999.
999毫米±9999.
9999英寸±99999.
999毫米±9999.
9999英寸切削进给速率每分进给(在100%倍率)1~15000毫米/分0.
01~600.
00英寸/分1~15000毫米/分0.
01~600.
00英寸/分快速移动进给速度(分别对每个坐标)30~24000毫米/分30~24000毫米/分3.
0~600.
0英寸/分3.
0~600.
0英寸/分切削进给速度上限6~15000毫米/分6~15000毫米/分0.
6~600.
0英寸/分0.
6~600.
0英寸/分手动进给速度0~1260毫米/分0~49.
6英寸/分0~1260毫米/分0~49.
6英寸/分刀具偏移量0~±999.
999毫米0~±99.
9999英寸0~±999.
999毫米0~±99.
9999英寸单步最小进给量0.
001毫米0.
0001英寸0.
001毫米0.
0001英寸间隙补偿量0~25毫米0~25毫米0~2.
5英寸0~2.
55英寸螺距误差补偿量(倍率为1时)0~±0.
007毫米0~±0.
007毫米0~±0.
0007英寸0~±0.
0007英寸存储行程极限范围从参考点起的距离±99999.
999毫米±99999.
999毫米±9999.
9999英寸±9999.
9999英寸暂停(单位:秒)0~99999.
9990~99999.
9990~99999.
9990~99999.
999Ⅴ附录篇-4(二,十进制转换表)4-1附录4二,十进制转换表十进制二进制十进制二进制十进制二进制十进制二进制00000000032001000006401000000960110000010000000133001000016501000001970110000120000001034001000106601000010980110001030000001135001000116701000011990110001140000010036001001006801000100100011001005000001013700100101690100010110101100101600000110380010011070010001101020110011070000011139001001117101000111103011001118000010004000101000720100100010401101000900001001410010100173010010011050110100110000010104200101010740100101010601101010110000101143001010117501001011107011010111200001100440010110076010011001080110110013000011014500101101770100110110901101101140000111046001011107801001110110011011101500001111470010111179010011111110110111116000100004800110000800101000011201110000170001000149001100018101010001113011100011800010010500011001082010100101140111001019000100115100110011830101001111501110011200001010052001101008401010100116011101002100010101530011010185010101011170111010122000101105400110110860101011011801110110230001011155001101118701010111119011101112400011000560011100088010110001200111100025000110015700111001890101100112101111001260001101058001110109001011010122011110102700011011590011101191010110111230111101128000111006000111100920101110012401111100290001110161001111019301011101125011111013000011110620011111094010111101260111111031000111116300111111950101111112701111111Ⅴ附录篇-4(二,十进制转换表)4-2十进制二进制十进制二进制十进制二进制十进制二进制1281000000016010100000192110000002241110000012910000001161101000011931100000122511100001130100000101621010001019411000010226111000101311000001116310100011195110000112271110001113210000100164101001001961100010022811100100133100001011651010010119711000101229111001011341000011016610100110198110001102301110011013510000111167101001111991100011123111100111136100010001681010100020011001000232111010001371000100116910101001201110010012331110100113810001010170101010102021100101023411101010139100010111711010101120311001011235111010111401000110017210101100204110011002361110110014110001101173101011012051100110123711101101142100011101741010111020611001110238111011101431000111117510101111207110011112391110111114410010000176101100002081101000024011110000145100100011771011000120911010001241111100011461001001017810110010210110100102421111001014710010011179101100112111101001124311110011148100101001801011010021211010100244111101001491001010118110110101213110101012451111010115010010110182101101102141101011024611110110151100101111831011011121511010111247111101111521001100018410111000216110110002481111100015310011001185101110012171101100124911111001154100110101861011101021811011010250111110101551001101118710111011219110110112511111101115610011100188101111002201101110025211111100157100111011891011110122111011101253111111011581001111019010111110222110111102541111111015910011111192101111112231101111125511111111Ⅴ附录篇-5(报警一览表)5-1附录5报警一览表(1)程序操作错(P/S报警)号码内容备注000需关/开机003数据位数过多004无地址输入005无数据输入006负号输入错007小数点输入错或无小数点输入009非法地址输入010非法G代码输入011F值指令错015同动轴过多.
021G02/G03,平面指定错.
029偏置量过大030偏置号过大.
031G10,偏置号过大或未指定032G10,偏置量过大035G39,偏置平面错或在G40状态037偏置平面外指定了G40044固定循环中指定了G27~G29059外部程序号未检索到.
060顺序号未检索到.
070存储容量不足071程序号或地址未检索到072存储的程序数过多.
073程序号相同.
074程序号超出1~9999.
076M98,P未指定.
077子程序嵌套过多.
078M98指定的程序号或顺序号未检索到.
079程序比较错080指定区域中,测量信号未ON.
081T代码未指令.
Ⅴ附录篇-5(报警一览表)5-2号码内容备注082T代码和测量程序段在同一程序段083测量段的轴错或增量指令.
085I/O输入格式错.
086I/O准备信号未通087I/O输入不停止.
090程序回零时无零点存储092G27,未回到零点.
100参数开关为开状态.
101按DEL键,开机清存储器111宏运算值过大.
112零作除数.
114宏指令时,H码未定义115宏指令时,变量号非法116非法赋值119SQRT,BCD的自变量为负125G65,指令了非法的地址128转移指令中,顺序号错或未检索到129最后一段缺少段结束标志:';'130宏开关没有打开,不能使用宏变量!
131用宏变量编程不能用宏变量的地址!
132一个字输入了两个小数点!
133子程序不能指定M30指令!
134主程序不能指定M99指令!
135Flash扇区擦除失败!
136电子盘容量不足!
137Flash写入失败!
138Flash电子盘标志写入失败!
139程序栈混乱!
140O号已存在,请先删除后执行该操作!
142未检索到指定字143向上检索,未检索到指定地址符144向下检索,未检索到指定地址符145格式错误,输入全部程序可输O-9999146串口输入程序操作失败!
147宏错误:转移到当前行将造成死循环Ⅴ附录篇-5(报警一览表)5-3148宏错误:找不到程序指定的顺序号号码内容备注149修复程序数据失败,开机清存储器150没有程序,无法运行151数据格式错误!
152串口传入无效参数153串口传入BIT参数数据存在非0、1字符!
154数据格式错误:无符号数据输入'-'号!
155串口传入位参数数据存在'-'号!
156串口传入的刀补号不存在!
157未定义错误!
158串口传入数据时,检查公司名称失败!
159串口传入数据时,检查系统型号失败!
160串口传入数据时,检查系统版本号失败!
161串口传入数据时,检查数据类型失败!
162数据格式错误:多余的小数点!
163数据格式错误:负号位置错!
164数据格式错误:位数据输入小数点!
165数据格式错误:小数位数过多!
166未打开程序开关!
167存储器为空,请先插入'O'号!
16869参数非法,系统将使用波特率960016970参数非法,将使用默认值722170未打开串口使能参数171除数为0!
172程序队列满!
173储存器中不存在要校验的程序!
(2)软超程报警号码内容备注1超出X轴正向行程极限2超出X轴负向行程极限3超出Y轴正向行程极限4超出Y轴负向行程极限5超出Z轴正向行程极限6超出Z轴负向行程极限7超出4轴正向行程极限8超出4轴负向行程极限手动反向运动能退出报警区域Ⅴ附录篇-5(报警一览表)5-4(3)驱动器报警(4)系统错误系统报警时,显示''MEMORYALARM:NO.
'后续报警号:号码内容备注01系统工作RAM出错.
02CMOS存储器写出错.
03EROM奇偶报警.
06WATCHDOG报警07CPU错误.
(0,3,4,6型错)08非法的非屏蔽中断09FPGA电压低10扩展板报警11电池报警1、检查5V电源;2、检查电源线连接是否牢靠;3、检查系统接地是否良好;4、排除外部电磁干扰.
(5)外部信息报警号码内容备注01M代码错.
程序中编入了非法的M代码.
02S代码错.
程序中编入了非法的S代码.
03T代码错.
程序中编入了非法的T代码.
04换刀时间没设定06换刀时间过长07M03,M04码指定错08主轴旋转时指定了S码.
09总刀位数参数设定错010启动自动循环时,防护门未关闭.
011换刀时反锁时间过长014卡盘液压压力不足015卡盘松时,启动了主轴016当前版本号序号内容备注*1驱动器未绪.
*2驱动器报警.
*3指令速率过大.
*=1/2/3/4,X/Y/Z/4轴Ⅴ附录篇-6(电源接通及复位时的状态)6-1附录6:电源接通及复位时的状态:状态不变或继续运动*:状态被取消或终止运动项目电源接通时复位时补偿值设置参数设定数据参数存储器中的程序顺序号显示*非模态G代码**模态G代码初值G代码(G20/G21不变)F机能*各种NC数据S,T或M机能*坐标系工件坐标值零移动**暂停**M,S或T代码传送**刀具长度补偿*MDI方式时非MDI时由参数'RS43'决定刀具半径补偿*MDI方式时非MDI方式时*执行中的动作调出子程序号的执行**(注)报警灯(ALM)灭(无报警时)灭(无报警时)NOTREADY*(急停灯亮)输出信号缓冲寄存器灭灯MDI方式时非MDI方式时*返回参考点灯*(紧急停时*)S或T代码*M代码**M,S或T选通信号**主轴回转信号(S模拟信号)CNC准备好信号ON伺服准备好信号ON(驱动报警除外)ON(驱动不报警时)循环启动灯**显示灯输出信号进给保持灯**注:在子程序执行中复位时,需返回到主程序开头,不能从子程序中途执行.
Ⅴ附录篇-7(参数一览表)7-1附录7参数一览表本表中没有提到的参数,必须设定为0.
本参数说明是以K1000M3轴系统说明的,K1000M4的参数见附录12.
004OTFPRDRNDECIIOFRS43DCSSCWOTFP1:输出最高频率为512Kpps.
0:输出最高频率为32Kpps.
RDRN1:空运行时,快速运动指令运行有效.
0:空运行时,快速运动指令运行无效.
DECI1:在返回参考点时减速信号为"1"表示减速(回零方式B时有效).
0:在返回参考点时减速信号为"0"表示减速.
IOF1:用MDI键入时,偏置值为增量值.
0:用MDI键入时,偏置值为绝对值.
RS431:G43,G44的偏移矢量在复位时被清零.
0:G43,G44的偏移矢量在复位时保持不变.
DCS1:MDI方式时,按【输出】键执行.
0:MDI方式时,按【循环启动】键执行.
SCW1:最小指令增量按英制系统(机床是英制系统).
0:最小指令增量按公制系统(机床是公制系统).
005NFDOTJHDPMXY2PMXY1RSJGPPDPCMDNFDO1:恒设为1TJHD1:在手动示教方式中,手轮有效.
0:在手动示教方式中,手轮无效.
PMXY2,PMXY1:设定固定循环G76,G87中的退刀方向.
PMXY2PMXY1退刀方向00+X01-X10+Y11-YRSJG0:按复位键时,系统自动关闭M03、M04、润滑、冷却输出.
1:按复位键时,对输出M03、M04、润滑、冷却输出没有影响.
PPD1:用绝对零点编程(G92)也设置相对坐标值.
0:用绝对零点编程(G92)不设置相对坐标值.
PCMD1:输出波形是脉冲.
0:输出波形是方波.
Ⅴ附录篇-7(参数一览表)7-2006PRGBTLCPGSTOVRIZMZZMYZMXPRGB:无意义.
TLCP1:在与指定平面(G17,G18,G19)垂直的轴上进行刀具长度补偿.
(刀具长度补偿B).
0:与指定平面无关,在Z轴上进行刀具长度补偿(刀具长度补偿A).
GST,OVRT≡0ZMZ,ZMY,ZMX当接通电源时,X,Y,Z轴的参考点返回方向和原始的反向间隙方向.
1:返回参考点方向及间隙方向为负.
0:返回参考点方向及间隙方向为正.
注:电源接通后,当该轴向与本参数设定的反方向运动时,最初完成反向间隙补偿.
007G93NSMZZCZZCYZCXG93N0:刚性攻丝无加减速.
1:刚性攻丝有加减速.
SMZ0:程序段拐角处的速度控制参见编程篇的"进给功能"一章.
1:所有含运动指令的程序段速度减速到零后,才执行下个程序段.
ZCX~ZCZ0:返回机械零点需要减速开关及零位信号.
1:磁开关回零方式C.
(在有机械零点时有效)若机床零点在轴"正"端(从负向往正向回零)时,需设置№006参数ZMZ-ZMX为负向回零.
若机床零点在轴"负"端(从正向往负向回零)时,需设置№006参数ZMZ-ZMX为正向回零.
连接时,除需将接近开关连接到系统的减速信号端外,还需将其连接到系统的零位信号上.
此种回零方式需设置系统零位信号为24V.
008PSG2PSG1NTHDDIRZDIRYDIRXPSG2,1主轴同位编码器的齿轮比1~8NTHD0:无螺纹加工主轴转速控制.
1:有螺纹加工主轴转速控制.
DIRZ~X0/1:各轴电机旋转方向选择.
改变参数,可以改变电机旋转方向.
009MPLSVRYZVRYYVRYXDALZDALYDALXMPLS0:M代码电平输出.
1:M代码脉冲输出.
VRYZ~X0/1:各轴驱动器准备就绪信号电平选择.
DALZ~X0/1:各轴驱动器报警信号电平选择.
零点快速回零低速接近开关Ⅴ附录篇-7(参数一览表)7-3010EILK.
1.
.
1.
.
1.
CPF4CPF3CPF2CPF1EILK:设定为零.
.
1.
恒定设定为1.
否则回零不对.
CPF4,3,2,1:螺距误差补偿及反向间隙补偿的脉冲频率(各轴共用).
补偿频率=(设定值+1)Kpps设定值=0~15.
011BDECBD8RVDLZDILKSGNZRNLCM98JSPDBDEC0:反向间隙补偿方式A,以固定的频率(CPF4,3,2,1及BD8设置)输出.
1:间隙补偿方式B,补偿数据以升降速方式输出,参数(CPF4,3,2,1及BD8设置)无效.
BD80:反向间隙补偿以参数№010设定的频率进行补偿.
1:反向间隙补偿以参数№010设定的频率的1/8进行补偿.
RVDL0:轴运动方向改变时,方向信号与脉冲信号同时输出.
1:轴运动方向改变时,先输出方向信号延迟一段时间后脉冲信号再输出.
ZDIL0:主轴制动输出时,轴互锁暂停.
1:主轴制动输出时,轴运动不互锁.
KSGN0:轴负向运动时,运动符号不保持.
1:轴负向运动时,运动符号保持.
ZRNL0:回零时,轴运动键不自保.
1:回零时,轴运动键自保.
返回零点后,运动停止.
运动过程中需停止时,按"回零"键或"RESET"键.
CM980:无意义.
JSPD0:手动主轴点动键仅在手动方式有效.
1:手动主轴点动键在任何方式都有效.
注:参数CP4,3,2,1,BD8设置改变后需开关机后才有效.
012APRSTMANLSMANLM30EDTBOFFVYEBCLISOTAPRS1:返回参考点后作自动坐标系设定.
0:不实现自动坐标系设定.
TMANL1:T代码时手动换刀.
0:T代码自动换刀.
SMANL1:S代码手动换挡.
0:S代码自动换刀.
M301:M30执行时,光标立刻返回开头(B型).
0:M30执行后,再次循环起动时光标返回开头(A型).
EDTB1:编辑插入机能A.
0:编辑插入机能B.
OFFVY1:即使在MRDY信号输出之前DRDY信号为ON,也不产生驱动器报警.
0:在MRDY信号输出之前DRDY信号为ON,产生驱动器报警.
Ⅴ附录篇-7(参数一览表)7-4EBCL:无意义.
ISOT1:在通电或急停后,没有返回参考点,手动快速移动起作用.
0:在通电或急停后,返回参考点之前,手动快速移动不起作用.
013G01SBKMDNCBEDALMPODIPML3PML2PML1G011:电源接通时,为G01状态.
0:电源接通时,为G00状态.
SBKM1:在执行宏指令时单程序段有效0:在执行宏指令时单程序段无效DNCB1:DNC启动时有进行程序预存.
0:DNC启动时无进行程序预存.
EDALM1:P/S报警时,可编辑程序或存盘.
PODI1:编程时,可小数点编程的地址在编程时没有编入小数点时,默认为有小数点.
例:X100自动认为是X100.
即100毫米.
应当注意的是,100μ应编为X0.
1而不能编为X100.
PML3,2,1:螺距误差补偿放大率.
设定的补偿值乘以此放大率,作为输出值.
PML2PML1放大率00*101*210*411*8(各轴共用)当PLM3为1时,上述值*16014PODG84SFXCOFXCSZRSZZRSYZRSXPOD0:小数点是否任意编入.
1:可以带小数点的地址必须编入小数点.
否则会产生报警:"007:小数点输入错或无小数点输入.
"注:1.
虽然F100.
=F100但在POD=1时,也必须编入小数点(F100.
)2.
由于Q可以代小数点,当给宏DO置1时,Q也必须编入1.
或001.
如给宏变量#1132置低八位全为1,G65H01P#1132Q0.
255.
G84S=0FXCO=0FXCS=0ZRSZ1:Z轴有机械零点.
(回零方式B)Ⅴ附录篇-7(参数一览表)7-50:Z轴无机械零点.
(回零方式A)ZRSY1:Y轴有机械零点.
(回零方式B)0:Y轴无机械零点.
(回零方式A)ZRSX1:X轴有机械零点.
(回零方式B)0:X轴无机械零点.
(回零方式A)015CMRX016CMRY017CMRZCMRXCMRYCMRZ:各个坐标的指令倍乘比设定范围:1~127.
018CMDX019CMDY020CMDZCMDX,CMDYCMDZ:各个坐标的指令分频系数.
设定范围:1~127.
021主轴准停/换档转速默认值为50.
022CRCDLCRCDL在刀具半径补偿C方式下,刀具忽略小移动量的限制值.
设定量:0~16383单位:毫米/分(毫米输出).
0~16383单位:英寸/分(英寸输出).
023SCTTIMSCTTIM设定从主轴指令执行到认为主轴转速到达的时间间隔.
设定量:0~255单位:毫秒.
024WLKTMZWLKTME:输入信号去抖动宽度.
设定范围:0~15.
0:0~16ms,1:16~32ms,2:32~48ms……027DNC启动时,预存程序占缓存的百分比默认值为50.
Ⅴ附录篇-7(参数一览表)7-6037PLPGVLPLPGVL:插补中断间隔.
0-8毫秒,1-4毫秒,2-2毫秒,3-1毫秒038RPDFX039RPDFY040RPDFZRPDFXRPDFYRPDFZ分别为X,Y,Z坐标快速移动速度.
设定量30~15000单位:毫米/分(毫米输出).
30~6000单位:0.
1英寸/分(英寸输出).
041LINTX042LINTY043LINTZLINTXLINTYLINTZ分别为X,Y,Z坐标线性加减速时间常数值(用于快速移动G00).
设定量:8~4000(单位:毫秒)044PSANGNPSANGN主轴模拟输出调整数据(S模拟输出).
设定方法如下:1.
设定标准值6252.
指令S模拟代码最大输出值(10V)3.
测量输出电压4.
用下述公式重设PSANGNPSANGN=10.
00*625÷测量电压5.
设定新数据后,校验输出电压最大值是否为10V.
045FEDMXFEDMX切削进给上限速度.
设定量:0~15000单位:毫米/分(毫米输出)6~6000单位:0.
1英寸/分(英寸输出)046SPDLCSPDLC:设定主轴速度偏置补偿值,也就是主轴速度指令电压的0偏置补偿值.
Ⅴ附录篇-7(参数一览表)7-7设定量:0~+-8191单位:VELO.
047FEEDTFEEDT切削进给和手动进给时指数加减速时间常数.
设定量:0~4000单位:毫秒.
此参数设"0"时,指数加减速功能无效.
048FEDFLFEDFL切削进给时的指数加减速的低速(FL速度)下限值.
设定量:0~15000单位:毫米/分(毫米输出).
0~6000单位:英寸/分(英寸输出).
通常此参数设"0"049CYCRCYCR固定循环G73高速深孔加工循环中的退刀量.
设定量:0~32767单位:毫米/分(毫米输出)6~32767单位:英寸/分(英寸输出)050CYCDCYCD固定循环G83高速深孔加工循环中的切削始点.
设定量:0~32767单位:毫米/分(毫米输出)0~32767单位:英寸/分(英寸输出)051RPDFLRPDFL快速移动倍率最低挡速度(FO),各轴通用.
设定量:6~15000单位:毫米/分(毫米输出)6~6000单位:0.
1英寸/分(英寸输出)052ZRNFLZRNFL返回参考点时的低速,FL速度(通用于各轴).
设定量:6~15000单位:毫米/分(毫米输出)6~6000单位:0.
1英寸/分(英寸输出)053BKLX054BKLY055BKLZⅤ附录篇-7(参数一览表)7-8BKLXBKLYBKLZ分别为X,Y,Z坐标间隙补偿量.
设定量0~2000单位:0.
001MM(MM输出)或0.
0001英寸(英寸输出)056GRHMAXGRHMAX用高速齿轮时的主轴最高转速(速度指令电压10V时的主轴转速).
设定量1~9999单位:转/分.
057GRHMIN058GRLMAX059SPDMAX060SPDMINGRHMINS模拟输出方式时用高速齿轮的主轴转速下限值.
设定量:1~9999单位:转/分GRLMAX低速齿轮时,主轴的最高转速.
设定量:1~9999单位:转/分SPDMAX主轴电机输出值上限.
用下列公式设定:主轴电机上限转速主轴电机最高转速*4095设定量:1~4095SPDMIN主轴电机输出值下限.
用下列公式设定:主轴电机下限转速主轴电机最高转速*4095设定量:1~4095061手动方式下,模拟主轴速度的初值默认值为100.
062手动方式下,模拟主轴速度的增量默认值为50.
Ⅴ附录篇-7(参数一览表)7-9064JOGFLJOGFL手动进给指令加减速低速下限(FL速度).
设定量:0~15000单位:MM/分(毫米输出).
0~6000单位:0.
1英寸/分(英寸输出).
065PFINTPFINT电源接通时的切削进给速度初值.
066SEQINCSEQINC自动插入程序顺序号时的号码增量值.
设定量:0~9999067恒线速控制下的主轴转速下限值单位:毫米/分.
068BRATE0BRATE0RS232接口设定的波特率.
设定量:1200~115200(单位:BPS).
(12002400480096001920038400576001152).
注:设定1152=115200069COMDEFBRATE1RS232接口特性定义.
设定量:BCD输入,低三位的BCD码(B2--BO)分别指定串口的不同特性,B0:奇偶校验(0-无校验,1-奇校验,2-偶校验);B1:数据停止位(1,2);B2:数据位(5,6,7,8)070LT1X1071LT1Y1072LT1Z1073LT1X2074LT1Y2075LT1Z2LT1X1~LT1Z2:各轴正/负向软限位.
Ⅴ附录篇-7(参数一览表)7-10设定量:0~±9999999(单位:0.
001MM或0.
0001英寸).
设定从参考点到行程极限的距离,所设定的区域之外为禁止区.
通常,存储行程极限应当设在最大行程,如果机床可动部分进入禁止区,就产生超程报警.
因为在监测运动中的时间间隔,要计算出一个行程容差.
其大小在公制系统中为快速移动速度(取作MM)的1/5倍,例如,快速移动速度如果为10M/MIN,那麽10*1/5=2MM.
此外,由于失步会使存在数控系统中的位置和机床的实际位置之间有一些差值,所以在工作之前总要进行参考点返回,否则,在此种状态开始工作所显示的超程监测点将包括此差值.
注:当某轴的正/负向软限位参数都设置为0时,该轴的软限位机能无效.
076PRSX077PRSY078PRSZPRSXPRSYPRSZ在自动坐标系设定中X,Y,Z坐标返回参考点时的坐标值设定.
设定量:0~9999999079PECINTX080PECINTY081PECINTZPECINTX,Y,Z每个坐标的螺距误差补偿间隙.
设定量:8000~9999999单位:0.
001MM(MM输入).
4000~9999999单位:0.
0001英寸(英寸输入).
注:如果此参数设为"0",则螺距误差补偿不能实现.
12方块区域N号顶点(1或2点,见图)坐标轴(X,Y或Z)Ⅴ附录篇-7(参数一览表)7-11附1:K1000M3轴数控系统螺距误差补偿参数及设定100PECORGXPECORGXX坐标螺距误差补偿零点.
设定量:0~127101228300PECORGYPECORGYY坐标螺距误差补偿零点.
设定量0~127301428500PECORGZPECORGZZ坐标螺距误差补偿零点.
设定量0~127501628X坐标螺距误差补偿量设定.
设定量:0~±7Z坐标螺距误差补偿量设定.
设定量:0~±7Y坐标螺距误差补偿量设定.
设定量:0~±7Ⅴ附录篇-7(参数一览表)7-12附2:K1000M3轴数控系统标准参数及含义参数号标准值意义1X2X3X411000000位参数510000100位参数600000000位参数701000000位参数800000000位参数900000000位参数1001110001位参数1100000000位参数1210000110位参数1301000000位参数1400001111位参数151X轴指令倍乘比161Y轴指令倍乘比171Z轴指令倍乘比182X轴指令分频系数192Y轴指令分频系数202Z轴指令分频系数2150主轴换档时的转速220刀补C微动省略极限23255SAR延迟时间242信号滤波时间2520未用2620未用2750DNC启动时,预存程序占缓存的百分比286000未用296000未用306000未用310未用320未用330未用34896未用35896未用36896未用370插补中断间隔388000X轴快移速率398000Y轴快移速率408000Z轴快移速率41100X轴直线加减常数42100Y轴直线加减常数参数号标准值意义43100Z轴直线加减常数441000主轴模拟输出调正454000切削进给上限速度460主轴模拟零漂补偿4750指数加减时间常数480指数加减速下限491000G73的退刀量501000G83的切削始点51400快速倍率最低速率52200回零点时的低速530X轴间隙补偿量540Y轴间隙补偿量550Z轴间隙补偿量569999主轴指令10V高齿档转速5799高齿主轴转速下限589999主轴指令10V低齿档转速594095主轴指令上限6041主轴指令下限61100手动模拟主轴速度初值6250手动模拟主轴速度增量630未用640手动加减速低速65200切削速度初值6610自动顺序号增量670恒线速控制下的主轴转速下限值689600串口波特率69722接口特性定义709999999+X向软件限位719999999+Y向软件限位729999999+Z向软件限位73-9999999-X向软件限位74-9999999-Y向软件限位75-9999999-Z向软件限位760回零后X向自动坐标值770回零后Y向自动坐标值780回零后Z向自动坐标值790X轴螺补间隔800Y轴螺补间隔810Z轴螺补间隔1000X轴螺补零点3000Y轴螺补零点5000Z轴螺补零点Ⅴ附录篇-8(PLC参数一览表)8-1附录8PLC参数及诊断信息一览表PLC参数的显示和设置在诊断页面,在诊断页面,一部分是诊断数据,不能设置.
另一部分是PLC的参数,可以进行设置.
PLC参数设置条件:方式:录入方式.
开关:程序开关为开时.
1.
诊断数据1.
1输入信号000HGARX16*DECXX14X13X12X11X10001SKPX26*DECYX24HEX22X21X20002SPALMX32*DECZ*ESPOV8OV4OV2OV1003X47X46X45X44*ESP2@SPSTKEY注:诊断003的BIT5在4轴系统时为*DEC4.
004*ESP3X56HZHYHX*100*10*11.
2输出信号048ZDVOIM05M32M08M10M04M03049FNLENBSRDYM33M09M11STLALM050S08S07S06S05S04S03S02S011.
3系统接口信号016RFZRFYRFXPCZPCYPCXPCX~Z:回零时,一转信号状态.
回零过程中,压上减速开关再抬起时变为零,当一转信号来时置1.
之后,一直保持为1.
RFX~Z:未用.
017RDYZRDYYRDYXALMZALMYALMXRDYX~RDYZ:驱动器准备就绪信号.
ALMZ~ALMX:驱动器报警信号.
Ⅴ附录篇-8(PLC参数一览表)8-2018HANDLDATA手轮数据019/20SPVALUE模拟主轴输出值.
1.
4内部机床操作面板№024~031:内部机床操作面板键.
1.
5键盘诊断信号№032~039:CNC键盘键诊断.
№040~047:机床操作面板键诊断.
MDI操作面板中按下对应的键时,相应位显示"1",释放按键后显示'0'.
1.
6PLC内部控制继电器№128~145:PLC内部控制继电器.
1.
7PLC–NCCNC信号这部分信号为CNC内部的PLC和CNC之间进行传送的信号.
供用户了解CNC内部的工作状态使用,与硬件电路无直接联系.
1.
7.
1PLC到CNC的信号CNC接收以下信号,如果系统有诸如不移动,或循环不启动等问题,可直接观察这些信号.
诊断的其它数据,为PLC与机床或PLC内部的中间继电器信号,经PLC处理后输出给CNC.
诊断号含义096HX/ROV1*DECX-X+X*LMX*LPX手轮X/快X轴手动手动X轴X轴速倍率1减速-X+X负限位正限位097HY/ROV2*DECY-Y+Y*LMY*LPY手轮Y/快Y轴手动手动Y轴Y轴速倍率2减速-Y+Y负限位正限位098HZ/DRN*DECZ-Z+Z*LMZ*LPZ手轮Z/空Z轴手动手动Z轴Z轴运行减速-Z+Z负限位正限位099MLK*ILKSBKBDTSM01机床互锁单程程序程序Ⅴ附录篇-8(PLC参数一览表)8-3锁住序段选跳选跳100ZRN*SSTPSORSARFINSTMP2MP1回零主轴主轴主轴速附助机自动循手轮增量开关停止定向度到达能完成环起动选择101ERSRT*SP*ESP*OV8*OV4*OV2*OV1外部手动进给急停*OV8~*OV1:倍率开关复位快速保持102PN8PN4PN2PN1KEYMD4MD2MD1外部程序号检索程序操作方式开关104R08IR07IR06IR05IR04IR03IR02IR01IS12位输入105SINDSGNR12IR11IR10IR09I主轴电压主轴电压S12位输入CNC/PLC极性106CDZSMZAFLOVCSOVCSOVBSOVA倒角误差辅助机倍率主轴倍率信号信号能锁住取消107SKIPDLKZNG*ABSMMIRYMIRX跳跃显示Z轴手动绝Y轴X轴信号锁住取消对信号镜向镜向108*INTX*INTY*INTZX,Y,Z轴互锁110UI07UI06UI05UI04UI03UI02UI01UI00111UI15UI14UI13UI12UI11UI10UI09UI0816位宏变量输入1.
7.
2CNC到PLC的信号Ⅴ附录篇-8(PLC参数一览表)8-4112OPSASTLSPLENBZPZZPYZPX113MADENRSTAL114DSTTFSFMF115M28M24M22M21M18M14M12M11116S28S24S22S21S18S14S12S11117T28T24T22T21T18T14T12T11126UO07UO06UO05UO04UO03UO02UO01UO00127UO15UO14UO13UO12UO11UO10UO09UO0816位宏变量输出2.
PLC参数修改PLC参数,需将程序开关打开.
160T1161T2162T3T1、T2、T3:主轴自动换档时间,单位:64ms.
(详见编程篇9-2)168/9RHTIME1RHTIME1:自动润滑开时间(15位二进制数).
单位:秒.
161为高字节,最高位不能设为1.
170/1RHTIME2RHTIME2:自动润滑关时间(15位二进制数).
单位:秒.
163为高字节,最高位不能设为1.
197MESP3MESP1MESP2MESP31:屏蔽急停信号*ESP3.
MESP11:屏蔽急停信号*ESP1.
MESP21:屏蔽急停信号*ESP2.
199OVRIEHPGEHOFEJOGMZRZMZRYMZRXOVRI1:进给倍率信号反向,用于特殊倍率开关.
EHPG1:选择外置手轮机能.
Ⅴ附录篇-8(PLC参数一览表)8-5EHOF0:选择外置手轮时,系统面板手轮方式无效.
1:选择外置手轮时,系统面板手轮方式有效.
当外置手轮输入信号HE=0时,系统的面板手轮方式,增量键,轴选择键有效.
EJOG1:系统可由输入接口信号来控制手动进给.
见连接篇4-10.
MZRZ~X:选择手动返回参考点轴运动方向键.
0:屏蔽该轴负向运动键.
即在手动返回参考点方式下,轴负向运动键无效.
1:屏蔽该轴正向运动键.
即在手动返回参考点方式下,轴正向运动键无效.
注:修改诊断199号参数,还需将参数开关打开.
200SLCDMSTM@SPMOTMESPMPWESKEYSOVISLCD0/1:液晶屏回扫空档/整个显示.
MST1:屏蔽3.
1的ST.
即该点信号为空.
不再是循环启动开关.
M@SP1:屏蔽3.
2的@SP.
即该点信号为空.
不再是进给暂停开关.
MOT1:不检查硬限位.
MESP1:屏蔽*ESP1/2/3.
所有急停无效,调试用.
MPWE1:屏蔽参数开关.
特殊情况下用.
SKEY1:选择程序开关在外部(3.
0).
特殊情况下用.
SOVI1:OV8~OV1为倍率开关.
注:DGN200的数据也可在程序开关为关时修改.
201SOTJOGSSOLAAURHSINCSUOSSOT:选择开机后软超程限位是立刻有效或返回参考点后有效.
0:开机后软超程限位立刻有效.
1:开机后软超程限位在返回参考点后有效.
JOGS:当选择模拟主轴后,手动方式下主轴速度控制方式选择.
0:模拟主轴速度由参数决定.
1:主轴模拟速度取决于编入的S代码.
如果开机没有S代码时,速度为0.
与自动方式的速度相同.
注:见第二篇9主轴功能.
SOLA1:有松拉刀控制机能.
AURH1:自动润滑机能有效.
诊断168~171设置开关时间.
SINC1:屏蔽单步/手轮增量0.
1,1两档.
用于防止步进机由于移动过快而失步.
SUOS1:选择S8~S1为宏输出(UO7~UO0).
注:当选择模拟主轴时,自动选择宏输出.
202MPOFKEY1MD4MD2MD1MPOF1:屏蔽电压低报警.
KEY11:开机时程序开关为开.
MD4~1:开机时选择的初始方式.
203当前刀号208MTIMEM代码处理时间或M代码脉冲宽度(8位二进制数).
单位:128毫秒.
Ⅴ附录篇-8(PLC参数一览表)8-6209STIMES代码处理时间(8位二进制数).
单位:128毫秒.
214SPSTOPT1发出主轴停止命令后到发出主轴停止信号的延迟时间T1(8位二进制数).
单位:16毫秒.
215/6SPZDDLT从发出主轴停止信号到发出主轴制动信号的延迟时间(16位二进制数).
单位:16毫秒.
217/8SPZDTIME主轴制动输出时间(16位二进制数).
单位:16毫秒.
219VOITIME发出外部蜂鸣器输出信号的时间(8位二进制数).
单位:32毫秒.
Ⅴ附录篇-9(操作一览表)9-1附录9操作一览表分类机能程序开关参数开关方式显示机能按钮操作清除参数初值+清其它电源ON时〖输入〗+0读盘读电子盘电源ON时〖输入〗+1~3参数输入编辑方式参数〖输入〗偏置量输入编辑方式偏置〖输入〗存储程序编辑/自动程序〖输入〗从计算机输入存电子盘编辑程序N→1~3→〖输出〗参数的输入录入方式参数P→参数号→光标〖↓〗→数据→〖输入〗偏置量输入偏置P→偏移号→〖输入〗→偏移量→〖输入〗用MDI键输入设置参数的输入录入方式设置数据(0/1)→〖输入〗参数输出编辑方式参数〖输出〗偏置量的输出编辑方式偏置〖输出〗全部程序输出编辑方式程序O→-9999→〖输出〗输出给计算机一个程序输出编辑方式程序O→程序号→〖输出〗程序号检索编辑/自动程序O→程序号→↓(光标)顺序号检索自动方式程序程序号检索后N→顺序号→↓(光标)字检索编辑方式程序检索的字→↓(光标)检索地址检索编辑方式程序检索的地址→↓(光标)全部程序删除编辑方式程序O→-9999→〖删除〗一个程序删除编辑方式程序O→程序号→〖删除〗字的删除编辑方式程序要删除的字检索后→〖删除〗字的变更编辑方式程序要变更的字检索后新数据→〖修改〗编辑字的插入编辑方式程序检索要插入的前一字新数据→〖插入〗校对存储器校对*编辑/自动程序〖输入〗注:为开.
*为关.
Ⅴ附录篇-10(规格一览表)10-1附录10规格一览表名称规格控制轴3~4轴(X,Y,Z,4)同时控制轴数@3~4轴最小设定单位0.
001毫米/0.
0001英寸最小移动单位0.
001毫米/0.
0001英寸最大指令值±8位快速进给速度24米/分,600英寸/分快速进给倍率FO,25,50,100%进给速度范围每分进给1~15000毫米/分0.
01~600英寸/分自动加减速有进给速度倍率0~150%手动连续进给同时一轴@同时2轴定位有插补直线/圆弧返回参考点有返回参考点检查有LCDT/MDI7.
5英寸液晶屏MDI软体键5+2个单步进给*1,*10,*100通讯接口RS232C暂停(秒)有机床锁住全部轴存储行程检查有准停状态有准停有存储型螺距误差补偿@有MDI运转有复位有空运转有单程序段有程序保护信号有自诊断功能有紧急停有Ⅴ附录篇-10(规格一览表)10-2名称规格CNC准备完毕信号伺服准备完毕信号报警信号分配完毕信号自动运转中信号自动运转启动中信号自动运转休止中信号电源准备完毕信号状态输出复位信号电源单相AC220V+10%-15%50HZ±1HZ内容规格坐标系设定有自动坐标系设定有零件坐标系设定有小数点输入有补偿数据的程序输入@有用户宏程序@有英制/公制转换@有刀具半径补偿B及拐角弧圆弧补偿有刀具半径补偿C有固定循环有间隙补偿有圆弧半径R指定有对称功能有Ⅴ附录篇-10(规格一览表)10-3·辅助功能名称规格辅助功能M2位辅助功能锁住有·主轴功能名称规格主轴功能S2位主轴模拟输出@有主轴倍率50~120%·刀具功能名称规格刀具功能@T01~08刀具补偿存储器±6位32个刀具长度补偿有·编辑,操作名称规格纸带存储长度640KB存储程序个数128个电子盘有,3个区程序号的显示有顺序号检索有程序号检索有跳过任选程序段1个外部零件号检索有(15个)程序保护有·显示名称规格显示汉字加工时间、零件数显示@有速度显示有Ⅴ附录篇-11(CNC状态的诊断信息)11-1附录11CNC状态的诊断信息CNC在自动运行中,没有报警,也不运动时,通过诊断画面显示,从诊断号№700~№823可以知道当前的CNC状态.
700CSCTCITLCOVZCINPCDWLCMTNCFIN当显示为'1'时,其意义如下:CFIN:正在执行M,S,T指令.
CMTN:正在执行轴运动指令.
CDWL:正在执行G04(暂停)指令.
CINP:正在进行在位检查.
COVZ:倍率为零.
CITL:互锁信号为ON.
CSCT:正在等待主轴到达信号.
701CRSTCTRDCTPU当显示为'1'时,其意义如下:CTPU:RS232接口正在输出.
CTRD:RS232接口正在输入.
CRST:急停或复位键为ON.
710D7D6D5D4D3D2D1D0710:WCHAREX串口读入的数据.
712STPRESTEMSRSTBCSU在自动循环运行时,在运行过程中,程序终止时,其停止运动的原因可通过此号诊断知道.
STP:停止运动.
REST:复位ON.
EMS:急停为ON.
RSTB:MDI复位键为ON.
CSU:内部使用.
800~2SUERRX~ZSUERRX~Z:X~Z轴升降速控制.
注:4轴时,4轴对应数据在诊断号D803.
820~2OUTPSX~ZOUTPSX~Z:系统经过电子齿轮比后输出给驱动器的脉冲数.
注:4轴时,4轴对应数据在诊断号D823.
Ⅴ附录篇-12(4轴系统补充说明)12-1附录12K1000M4轴系统补充说明附12.
1K1000M4轴数控系统标准参数及含义参数号标准值意义1X2X3X411000000位参数510000100位参数600000000位参数701000000位参数800000000位参数900000000位参数1000000000位参数1101110001位参数1200000000位参数1310010110位参数1401000000位参数1500001111位参数161X轴指令倍乘比171Y轴指令倍乘比181Z轴指令倍乘比1914TH轴指令倍乘比202X轴指令分频系数212Y轴指令分频系数222Z轴指令分频系数2324TH指令分频系数2450主轴换档时的转速250刀补C微动省略极限26255SAR延迟时间272信号滤波时间284未用295未用3050DNC时预存程序占缓存的百分比3120未用326000未用336000未用346000未用356000未用360未用370未用380未用390未用40896未用41896未用42896未用42896未用43896未用440插补间隔458000X轴快移速率468000Y轴快移速率478000Z轴快移速率4880004TH轴快移速率49100X轴直线加减常数50100Y轴直线加减常数51100Z轴直线加减常数参数号标准值意义521004TH轴直线加减常数531000主轴模拟输出调正544000切削进给上限速度550主轴模拟零漂补偿5650指数加减时间常数570指数加减速下限581000G73的退刀量591000G83的切削始点60400快速倍率最低速率61200回零点时的低速620X轴间隙补偿量630Y轴间隙补偿量640Z轴间隙补偿量6504TH轴间隙补偿量669999主轴指令10V高齿档转速6799高齿主轴转速下限689999主轴指令10V低齿档转速694095主轴指令上限7041主轴指令下限71100手动模拟主轴速度初始值7250手动模拟主轴速度增量值730未用740未用750手动加减速低速76200切削速度初值7710自动顺序号增量780未用799600串口波特率80722串口特性819999999+X向软件限位829999999+Y向软件限位839999999+Z向软件限位849999999+4TH向软件限位85-9999999-X向软件限位86-9999999-Y向软件限位87-9999999-Z向软件限位88-9999999-4TH向软件限位890回零后X向自动坐标值900回零后Y向自动坐标值910回零后Z向自动坐标值920回零后4TH向自动坐标值930X轴螺补间隔940Y轴螺补间隔950Z轴螺补间隔9604TH轴螺补间隔2000X轴螺补零点4000Y轴螺补零点6000Z轴螺补零点80004TH轴螺补零点Ⅴ附录篇-12(4轴系统补充说明)12-2附12.
2K100M4轴数控系统位参数及含义位参数与3轴系统相同时,含义同3轴系统.
004OTFPRDRNDECIIOFRS43DCSSCW005NFEDTJHDPMXY2PMXY1RSJGPPDPCMD006PRGBTLCPGSTOVRIZM4ZMZZMYZMX007G93NNTHDSMZZC4ZCZZCYZCX008VRY4VRYZVRYYVRYXDIR4DIRZDIRYDIRX009TSUBTJOGADW2ADW1ADW0PSG2PSG1MPLSTSUB0:T代码的执行由参数012的CM98决定.
1:执行T代码时,系统自动调用子程序O9200,同时变量#131自动设置T代码后面的数字.
TJOG1:手动换刀或指定换刀机能有效.
ADW2~0:选择第4轴显示的地址(A,B,C,U,V,W).
010OTZNCROTDAL4DALZDALYDALXOTZN1:不检查Z轴软限位.
CROT0:选择第4轴是直线轴.
1:选择第4轴是旋转轴.
011EILK.
1.
.
1.
.
1.
CPF4CPF3CPF2CPF1EILK1:各轴互锁机能有效.
当设置诊断199QJSL为1,即选择了气动夹紧放松的旋转分度头控制机能时,如果气动放松到位信号没有输入时,第4轴处于互锁状态.
此时该轴互锁信号为0,手动方式下,第4轴无法移动,自动方式下,如果有第4轴指令,则所有轴移动指令暂停.
如:自动方式执行X,4轴插补,如果第4轴互锁信号有效,则运动暂停,信号撤消后,程序继续执行.
如果程序中无第4轴移动指令,则按正常执行,与第4轴互锁信号无关.
当轴处于互锁状态而无法移动时,可以观察DGN700的CITL位知道系统的状态.
也可以观察DGN108知道轴是否处于互锁状态.
诊断信息108*ILK4*ILKZ*ILKY*ILKX*ILK4:为1时正常,为0时表示第4轴处于互锁状态.
*ILKX,Y,Z:恒为1.
012BDECBD8RVDLZDILKSGNZRNLCM98JSPD013APRSTMANLSMANLM30EDTBOFFVYEBCLISOT014G01SBKMDNCBEALMPODIPML3PML2PML1Ⅴ附录篇-12(4轴系统补充说明)12-3015PODG84SFXCOFXCSZRS4ZRSZZRSYZRSX附12.
3输入输出信号表附12.
3.
1输入信号诊断表位号:76543210HGEARX16*DECXX14S@SOLAUI2UI1UI0XS54:9XS54:22XS54:23XS54:10XS54:24XS54:11XS54:25XS54:12PSWIQFSIM11IM10I诊断号000插座脚号分度头【说明】HGEAR:模拟主轴手动换档输入信号.
*DECX:X轴机械回零减速输入信号.
S@SOLA:松拉刀的输入信号.
UI2-UI0:宏指令输入信号.
PSWI/QFSI/M11I/M10I:第4轴旋转分度头控制功能输入信号,详见附12.
6.
位号:76543210SKPX26*DECYX24UIBUIAM21IM20IXS54:15XS54:16XS54:17XS54:18XS54:19XS54:20XS54:8XS54:21*LM*LP诊断号001插座脚号硬限位【说明】SKP:G31测量输入信号.
*DECY:Y轴机械回零减速输入信号.
UIB/UIA:宏指令输入信号.
M21I:转台松开输入信号.
M20I:转跳夹紧输入信号.
*LM/*LP:硬限位输入信号.
位号:76543210SPALMX32*DECZ*ESPOV8OV4OV2OV1XS54:4XS54:5XS54:6XS54:7XS56:14XS56:15XS56:7XS56:8诊断号002插座脚号【说明】SPALM:主轴报警信号输入.
*DECZ:Z轴机械回零减速输入信号.
*ESP:急停输入信号.
OV8-OV1:倍率开关输入信号.
Ⅴ附录篇-12(4轴系统补充说明)12-4位号:76543210HIGISOLA*DEC4LOWI*ESP2@SPSTKEYXS54:1XS54:2XS54:3XS56:4XS56:3XS56:2XS56:1诊断号003XS54:14插座脚号【说明】HIGI;模拟主轴高档检测到位信号.
LOWI:模拟主轴低档检测到位信号.
SOLA:松拉刀检测到位信号.
*DEC4:4轴机械回零减速输入信号.
*ESP2:附加面板急停开关输入信号.
SP:附加面板进给保持开关输入信号.
ST:附加面板循环启动开关输入信号.
位号:76543210*ESP3H4HZHYHX*100*10*1XS61:12XS61:3XS61:2XS61:1诊断号004插座脚号XS61:13XS61:14XS61:9XS61:4【说明】*ESP3:急停开关输入信号.
H4/HZ/HY/HX:外置手轮轴选择输入信号.
诊断参数198的EHPG=1时有效.
*100/*10/*1:外置手轮增量输入信号.
附13.
3.
2输出信号诊断表位号:76543210ZDVOIM05M32M08M10M04M03诊断号048XS57:15XS57:2XS57:14XS57:1XS57:3XS57:16XS57:4XS57:17插座脚号【说明】ZD:主轴制动输出信号.
VOI:报警时,输出给外部蜂鸣器信号.
M05:主轴停止输出信号.
M32:润滑油开输出信号.
M08:冷却液开输出信号.
M10:代码M10输出信号或气动夹紧输出信号.
M04:主轴反转输出信号.
M03:主轴正转输出信号.
Ⅴ附录篇-12(4轴系统补充说明)12-5位号:76543210FNLENBJOGOM33M09M11M21M20诊断号049XS57:19XS57:6XS57:18XS57:5XS57:7XS57:20XS57:8XS57:21插座脚号【说明】FNL:加工完成指示信号.
ENB:模拟主轴输出指示信号.
JOGO:手动/手轮/单步/回零方式指示信号.
M33:润滑油关脉冲输出信号.
M09:冷却液关脉冲输出信号.
M11:代码M11脉冲输出信号.
M21:转台放松输出信号.
M20;转台夹紧输出信号.
位号:76543210SOLAOY36Y35UO4UO3UO2HIGOLOWOUO1UO0S05S04S03S02S01M11O诊断号050XS57:23XS57:10XS57:22XS57:9XS57:11XS57:24XS57:12XS57:25插座脚号宏输出主轴档位分度头【说明】SOLAO:松拉刀输出信号.
S05-S01:主轴机械换档输出信号.
UO4-UO0:宏指令输出信号.
HIGO:模拟主轴高档输出信号.
LOWO:模拟主轴低档输出信号.
M11O:分度头控制气动放松输出信号.
详见附12.
6.
Ⅴ附录篇-12(4轴系统补充说明)12-6附13.
3.
3输入输出信号在插座XS54和XS57中的排列输入信号在插座XS54中的排列输出信号在插座XS57中的排列HIGI14SKP15X2616*DECY17X2418UIB19UIA20M20I21X1622*DECX23S@SOLA24UI125SOLA1*DEC42LOWI3SPALM4X325*DECZ6*ESP17M21I8HGEAR9X1410UI211UI012131VOI2M103M044M055ENB6M117M218JOGO9Y3610UO211HIGO12Y351314M3215M0316M0817ZD18M3319M2020M0921FNL22UO423LOWO24UO325SOLAO输入信号在插座XS56中的排列输入信号在插座XS61中的排列1KEY2ST93@SP100V0V4*ESP211+5V5HA12+5V6HB13+5V70V140V8+12V15+12V1KEY2ST93@SP100V0V4*ESP211+5V5HA12+5V6HB13+5V70V140V8+12V15+12VKEY*OV8*OV4*OV2*OV1*1+24V+24V*10*100*ESP3H4HXHYHZⅤ附录篇-12(4轴系统补充说明)12-7附12.
4输入输出信号说明KND-100M4轴系统共有40个输入信号、24个输出信号.
其中大多数信号的定义与使用方法与K100M3轴系统相同,下面只介绍不同部分.
附12.
4.
1松拉刀控制——S@SOLA/SOLAI/SOLAO(1)输入接口S@SOLA:松拉刀的输入接口.
SOLAI:松拉刀检测到位信号.
(2)输出接口SOLAO:松拉刀输出信号.
(3)功能说明系统循环启动时,会检测到位信号SOLAI是否为1.
如果是,会产生报警,并不启动自动循环.
报警信息:"015:song-latoolerror.
".
松拉刀的输出信号SOLAO由输入接口S@SOLA来控制.
时序图如下:附12.
4.
2手动方式输出——JOGO系统在手动方式、手轮/单步方式、回零方式时,输出接口JOGO为1,否则为0.
附12.
4.
3转台夹紧及松开机能——M20I/M21I/M20/M21系统增加特殊M程序代码M20和M21,M20用来控制转台夹紧,M21用来控制转台松开.
程序执行过程如下:M20:输出信号M20(转台夹紧),等待输入信号M20I为高电平时,关闭M20输出,该程序段结束.
M21:输出信号M21(转台放松),等待输入信号M21I为高电平时,关闭M21输出,该程序段结束.
附12.
4.
4硬件限位机能——*LM/*LP当设置诊断参数200的MOT=0时,系统具有硬件限位机能.
输入接口*LM为轴负向限位,*LP为轴正向限位.
连接时,应将4个轴的负向限位开关串接入*LM,4个轴的正向限位开关串接入*LP.
某轴限位有效时,4个轴手动方式可以向相反的方向移动,从而退出限位区域.
注:请注意硬限位与软限位的区别,当将某轴的正、负软限位参数都设置为0时,该轴的软限位机能无效.
附12.
4.
5模拟主轴自动换档机能——HIGI/LOWI/HIGO/LOWO模拟主轴可自动换高低两档.
主轴高齿档的最高转速设置在参数056,主轴高齿档的最低转速设置在参数057,主轴低齿档的最高转速设置在参数058.
在系统开机的初始状态,系统默认为低档(但低齿档输出接口无输出).
当指定的模拟主轴速度超过低齿档的最高速度时,开始自动换档.
换档过程:输出信号SOLAO开关信号S@SOLAⅤ附录篇-12(4轴系统补充说明)12-8(1)轴运动停止,模拟主轴输出为参数021设定的转速.
(2)延迟诊断参数160设定的时间后,输出换档信号HIG(或LOW).
(3)检测档位信号HIGI(或LOWI)是否到位.
(4)到位后,延迟诊断参数161设定的时间.
(5)主轴以编程的转速旋转.
(6)延迟诊断参数162设定的时间后,取消轴停止,换档结束.
当模拟主轴在高速档旋转,而新指定的模拟主轴速度低于主轴高齿档的最低转速,则会自动进行由高齿档到低齿档的转换.
换档过程与上述过程一致.
注:当参数设定P056≤P058时,系统无自动换档机能,按P056设定的转速输出.
附12.
4.
6外置手轮机能有关参数:诊断199的EHPG、EHOF.
输入接口:H4/HZ/HY/HX/*100/*10/*1.
使用方法详见连接篇4-10,附录篇8-4.
附12.
5T代码调用子程序机能(可用于换刀控制)如果设置系统参数009的TSUB=1,则系统执行T代码时,会自动调用子程序(程序号固定为O9200),同时变量#131自动设置为T代码后的数字.
应用举例:1.
自动换刀换刀代码:T**;换刀过程:系统执行T代码时,变量#131自动设置为刀号(如:执行T02;则系统变量#131=2),同时自动调用子程序O9200.
换刀过程就在子程序O9200内用宏代码编制.
2.
手动换刀当设置参数009的TJOG=1时,手动换刀或指定换刀机能有效.
操作过程如下:(1)在宏变量#100中设置需换的刀号.
若顺序换下一把刀,则设置为0.
(2)自动方式下,面板上的〖换刀〗键按下时,键上的指示灯亮.
(3)按循环启动,系统会自动检索程序O9201,并自动执行.
手动换刀程序编制在子程序O9201中.
O9201编制说明:O9201;Ⅰ:判断变量#100是否为0.
不为0,执行Ⅱ;为0,跳转到Ⅲ.
Ⅱ:指定换刀.
T#100;(赋值#131=#100,调用换刀子程序O9200)Ⅲ:顺序换刀.
使#515=#515+1,(假设变量#515中保存当前刀号)T#515;(赋值#131=#515,调用换刀子程序O9200)M30;子程序结束)Ⅴ附录篇-12(4轴系统补充说明)12-9附12.
6第4轴采用气动夹紧放松的旋转分度头控制功能(1)参数选择诊断199QJSLQJSL1:选择了气动夹紧放松的旋转分度头控制机能.
当设置QJSL=1后,以下机能有效.
(2)相关机能2.
1手动夹紧,放松控制在手动方式(手动连续,点动,手轮)下,按一次手动夹紧按钮,输出M10点,关闭M11输出.
在手动方式(手动连续,点动,手轮)下,按一次手动放松按钮,输出M11点,关闭M10输出.
2.
2自动夹紧,放松控制M10:执行M10时,输出M10点,关闭M11输出,经过参数DGN166设置的时间后,执行结束.
输出仍保持.
M11:执行M11时,输出M11点,关闭M10输出,系统接收到气动'放松'到位(QFSI)输入信号后,执行结束.
输出仍保持.
2.
3外部气压检测报警当信号(PSWI)气压报警输入时,系统产生外部报警014:外部气压低,内部产生急停(准备未绪).
2.
4第4轴驱动(SV-ON)控制信号MRDY4改为输出点控制.
除原MRDY4控制外,如果:气动'放松'到位输入信号(QFSI)没有接收到(信号为0电平)MRDY4无输出.
原MRDY4信号无效,改接为系统输出信号:MRDY4.
(3)相关输入输出信号输入信号诊断000X17X16*DECXX14SW@SOLAUI2UI1UI0D199QJSL=1PSWIQFSIM11IM10I选择了气动夹紧放松的旋转分度头控制机能后M10I:手动夹紧按钮输入点.
M11I:手动放松按钮输入点QFSI:气动'放松'到位输入信号PSWI:气压到达信号输出信号诊断048M10诊断050Y36Y35D199QJSL=1M11OMRDY4M10:气动夹紧输出.
M11O:气动放松输出.
MRDY4:第4轴MRDY信号输出.
Ⅴ附录篇-12(4轴系统补充说明)12-10(4)第4轴互锁机能1参数选择参数011EILKEILK1:各轴互锁机能有效.
当选择诊断199QJSL为1,即选择了气动夹紧放松的旋转分度头控制机能时,如果气动放松到位信号没有输入时,第4轴处于互锁状态.
此时该轴互锁信号为0,手动方式下,第4轴无法移动,自动方式下,如果有第4轴指令,则所有轴移动指令暂停.
如:自动方式执行X,4轴插补,如果第4轴互锁信号有效,则运动暂停,信号撤消后,程序继续执行.
如果程序中无第4轴移动指令,则按正常执行,与第4轴互锁信号无关.
当轴处于互锁状态而无法移动时,可以观察DGN700的CITL位知道系统的状态.
也可以观察诊断108知道轴是否处于互锁状态.
诊断信息诊断108*ILK4*ILKZ*ILKY*ILKX*ILK4:为1时正常,为0时表示第4轴处于互锁状态.
*ILKX,Y,Z:恒为1.
Ⅴ附录篇-13(通讯软件说明)13-1附录13通讯传送软件使用说明1.
DOS版本将文件拷入计算机,运行文件KND.
BAT,在计算机显示上会出现以下画面:KNDCNC-TalkerV3.
20Com0:2400STComTransRecivK-DNCKeditEsc-ExitF1F2F3F4F5STCom(F1键):设置计算机的串口(0或1,一般计算机有两个串口,0/1口,通过这两个任一个口都可以与CNC的RS232接口相连,连接在计算机的0或1口后,需用F1键进行设置)及波特率.
运行KND.
BAT后,自动默认计算机的0口,波特率默认值为2400.
Trans(F2键):从计算机向CNC传送数据.
按下F2键后,计算机在其下一行会提示:S/C:Filenametotransmit::此时,输入文件的路径及名称.
如果文件在DNC软件的同一目录下,路径可省略.
按回车键.
提示变为:S/C:Transmitting*****…Esc:Stop,此时,操作CNC侧,之后,传送的数据会在显示屏上向上滚动显示.
*****为输入的文件名.
Reciv(F3键):从CNC向计算机传送数据.
按下F3键后,计算机在其下一行会提示:S/C:Filenametostore:此时,输入文件的路径及名称.
如果文件在DNC软件的同一目录下,路径可省略.
按回车键.
提示变为:S/C:Receiving****…Esc:Stop此时,操作CNC侧,之后,传送的数据会在显示屏上向上滚动显示.
K-DNC(F4键):从计算机向CNC传送加工程序进行DNC方式的加工.
按下F4键后,计算机在其下一行会提示:S/C:Filenametotransmit:此时,输入要加工程序的路径及名称.
如果文件在DNC软件的同一目录下,路径可省略.
按回车键.
提示变为:S/C:K-DNCTransmitting****…Esc:Stop此时,操作CNC侧,之后,传送的程序会随着程序的执行,显示屏上向上滚动显示.
简单测评v5.net的美国cn2云服务器:电信双程cn2+联通AS9929+移动直连
v5.net一直做独立服务器这块儿的,自从推出云服务器(VPS)以来站长一直还没有关注过,在网友的提醒下弄了个6G内存、2核、100G SSD的美国云服务器来写测评,主机测评给大家趟雷,让你知道v5.net的美国云服务器效果怎么样。本次测评数据仅供参考,有兴趣的还是亲自测试吧! 官方网站:https://v5.net/cloud.html 从显示来看CPU是e5-2660(2.2GHz主频),...
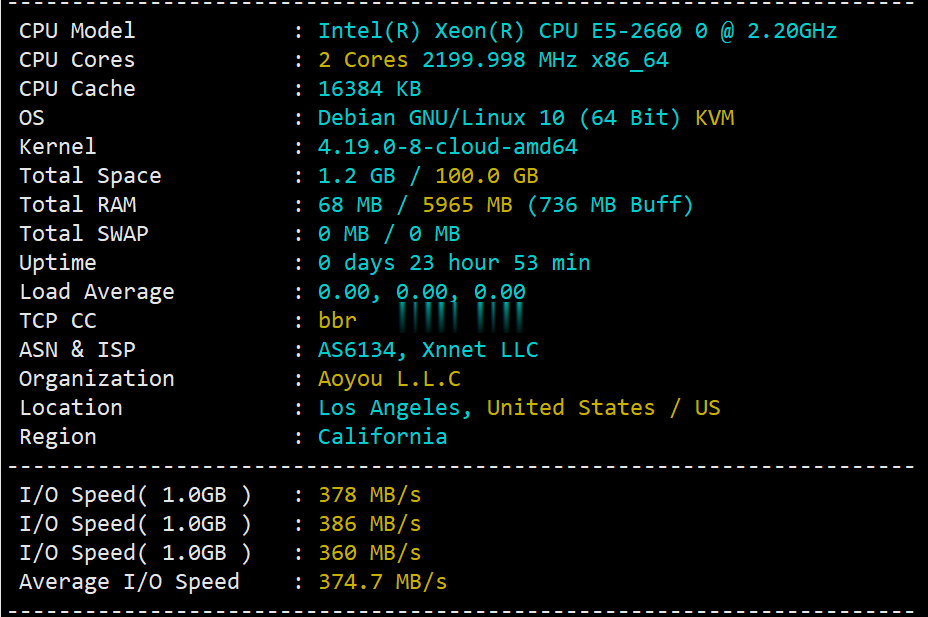
BuyVM迈阿密KVM上线,AMD Ryzen 3900X+NVMe硬盘$2/月起
BuyVM在昨天宣布上线了第四个数据中心产品:迈阿密,基于KVM架构的VPS主机,采用AMD Ryzen 3900X CPU,DDR4内存,NVMe硬盘,1Gbps带宽,不限制流量方式,最低$2/月起,支持Linux或者Windows操作系统。这是一家成立于2010年的国外主机商,提供基于KVM架构的VPS产品,数据中心除了新上的迈阿密外还包括美国拉斯维加斯、新泽西和卢森堡等,主机均为1Gbps带...
DMIT(季度$28.88)调整洛杉矶CN2 GIA优化端口
对于DMIT商家已经关注有一些时候,看到不少的隔壁朋友们都有分享到,但是这篇还是我第一次分享这个服务商。根据看介绍,DMIT是一家成立于2017年的美国商家,据说是由几位留美学生创立的,数据中心位于香港、伯力G-Core和洛杉矶,主打香港CN2直连云服务器、美国CN2直连云服务器产品。最近看到DMIT商家有对洛杉矶CN2 GIA VPS端口进行了升级,不过价格没有变化,依然是季付28.88美元起。...

-
软银集团日本软银是什么呀?游戏加速器哪个好大家玩游戏用的都是什么加速器啊,哪个效果最好游戏加速器哪个好网游加速器哪个最好用?游戏加速器哪个好网游加速器那个好?绝地求生加速器哪个好绝地求生用什么加速器比较好?ps软件哪个好什么PS软件好英语词典哪个好买什么英语词典比较好杰士邦和杜蕾斯哪个好安全套杜蕾丝好还是杰士邦好?dnf魔枪士转职哪个好dnf魔枪士转职哪个适合平民玩看书软件哪个好手机阅读软件哪个好用?